Поздравляю, идея классная, а я все голову ломал, что ты там задумал :о)
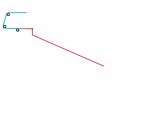
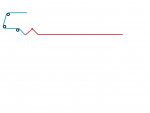
Сделай хвост гибким, чтоб в первый момент не так резко выпихивалась ручка. Например пластиковая удочка. Так же можно вставить резиновый участок в шнур, это даст возможность помогать автомату руками.
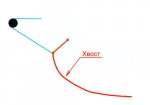
И еще одна мысль. Вспомни, как ты работаешь ручкой на посадке: сначала по-чуть-чуть выпихиваешь, а по мере приближения земли и снижения скорости все сильнее, и уже перед самым касанием энергичный пих. При прямом хвосте получается обратная картина: в первый момент наиболее энергичное выпихивание, а потом все меньше и меньше.
Хорошо бы фигурный хвост, по форме запятой. В первый момент плечо рычага самое длинное, перемещение трапеции умеренное, при снижении земли начинает касаться выпуклая часть, трапеция выдается энергичнее.
Ну надеюсь понимаешь, показана идея, какой лучше сделать изгиб надо думать по месту, можно эту идею сочетать с гибким хвостом и резиновой вставкой в шнур, можно стянуть концы удочки веревкой, получится как раз такая вот "запятая" как на рисунке, в-общем вариантов тьма.
 52,1 КБ Просмотры: 93
52,1 КБ Просмотры: 93