Тоже как-то делал подобный эксперимент:
https://www.youtube.com/watch?v=m4Zbekdk2QQ
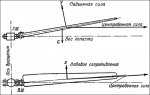
Пенопластовые нервюры на веревочке. Автостабильный профиль (Cm>0). Трос проходит на 16% хорды, что согласно продувке в XFLR5, должно соответствовать на этом профиле углу атаки около 12%. Но так как вдоль троса дополнительных грузов не было, то с учетом массы самих пенопластовых профилей, реально центр масс находился далеко позади. То есть в свободном планирующем состоянии такая лопасть неустойчива по тангажу.
Однако при большой центробежной силе трос натягивается и получается, что профиль может вращаться фактически только вокруг троса. То есть трос становится аналогом твердого лонжерона крыла. Линией, где расположены центры масс на профилях (массы, приходящей от пилота, разумеется. а массами самих профилей можно пренебречь, так как создаваемая ими подъемная сила намного больше их веса. хотя учитывать ее тоже надо, конечно). В итоге лопасть становится устойчивой по тангажу.
Мне это было интересно чисто с теоретической точки зрения, чтобы подтвердить свое понимание происходящих там процессов. Все эти режимы с разными грузами (т.е. с разной центробежной силой) и переходами из неустойчивого в устойчивое положение хорошо видны на видео.
При такой сверхлегкой лопасти нет проблем добавить утяжелители вдоль троса, чтобы ЦМ каждого профиля изначально был на 14-16% хорды, чтобы лопасть была устойчива по тангажу изначально. Но похоже, что можно обойтись и одним концевым грузом. В этом случае лопасть будет аэродинамически устойчива только начиная с некоторых оборотов (или некоторой массы груза, а точнее, величины центробежной силы). Дальше уже надо считать что выгоднее по весу и/или простоте конструкции.
ИМХО, сделать ранцевый вертолет с гибкой лопастью вполне реально =). Причем скорее всего лучше делать сразу однолопастный (https://www.youtube.com/watch?v=u3GeP87fMtY). Тогда его можно будет запускать как на первом видео. Перехватывая руками и вращаясь самому. А после раскрутки запускать двигатель. По ощущениям, запустить так лопасть длиной до 3-4 м можно без проблем... Т.е. вполне достижим общий диаметр винта до 6-8 м.
Удивила также возможность управлять шагом лопасти. Я думал, что ротор будет лететь сам по себе, благодаря автостабильному профилю с большим положительным Cm. А действия пилота никак не будут влиять на него, так как любые изгибы погасятся на незначащей первой трети лопасти, а основная часть, начиная с половины диаметра, будет лететь на своем заложенном положением лонжерона угле атаки...
Но оказалось, что обшивка тоже изрядно натягивается, поэтому в некоторых пределах углом лопасти можно управлять. Хотя это, возможно, зависит от оборотов и удельной нагрузки, поэтому на полноразмерном аппарате может не сработать.
Наиболее простым вариантом реализации сейчас видится авиамодельный электромотор 10-15 кВт с каким-нибудь легким редуктором. А на хвостовой винт второй отдельный электромотор с винтом.
P.S. А так, конечно, гибкая лопасть по принципу работы ничем не отличается от жесткой. Просто есть нюансы с реализацией и с начальной раскруткой. И с практически полным отсутствием жесткости вдоль осевого шарнира. Если не ошибаюсь, на вертолетах применяют профили с околонулевым Cm, а тут ее явно придется обеспечивать чисто аэродинамически. То есть Cm должен быть выше, а значит аэродинамическая эффективность гибкой лопасти будет несколько хуже жесткой. Но меньше вес, возможно будет проще изготовить, а главное - после полета можно смотать в рулон и положить в рюкзак =).
Хорошая новость также, что при скорости кончика лопасти под 180 м/с, набегающий поток будет создавать давление около 0.2 атм. Так что, теоретически, лопасти можно сделать надувными из лодочной ткани 400-800 г/м2. Или даже самонадувными, с воздухозаборниками по принципу как летают парапланы.