Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Примечание: This feature may not be available in some browsers.
Вы используете устаревший браузер. Этот и другие сайты могут отображаться в нем неправильно.
Необходимо обновить браузер или попробовать использовать другой.
Необходимо обновить браузер или попробовать использовать другой.
Беседы о теории машущего полёта.
D
DesertEagle
Ну почему же, привод у Ярно чисто вращательный. К нему можно подключить при желании ДВС через редуктор. Если ДВС с центробежной муфтой, то на холостых крылья не будут махать, а давая газу увеличивается частота и как следствие тяга. Все хорошо ).Kimon сказал(а):....и если что-то и полетит, по принципу махолёта - то только на этих самых, электронных эргономических сервоусилителях
Ну, я уже раскроил ткань на однослойный "параплан", осталось сшить и можно экспериментировать.необходимо стремиться к более простому, и Лёгкому варианту.


Легче конструкцию не придумать. Масса однослойника примерно половина от массы обычного параплана, то есть крыло площадью 50 м2 может весить 4 кг 🙂.
Правда и недостатки сразу видны - наличие арочности и мах вверх только пассивный. А вот у Ярно мах вверх активный, что добавляет тяги и позволяет использовать крыло меньшей площади.
Вообще, у Ярно чисто "моторный" махолет с соответствующей динамикой. Что хорошо, потому что подобный полет (я имею ввиду подобный по скорости и динамике) хорошо изучен на дельтапланах с мотоподвесками и парамоторах. А значит как только Ярно получит достаточную тягу, то аппарат без сомнения будет летать нормально. На таких площадях крыла и таких скоростях прекрасно работает управление весом, взлет и посадка с ног тоже на практике не вызывают затруднений. Аварийное приземление при отказе движков на дельтах и парамоторах достаточно хорошо испытано, чтобы утверждать о его приемлимой безопасности.
JohnDoe
Усы-то сбрею, а умище-то куда дену? )))
- Откуда
- где-то в России....
Братцы, а никто ещё тут гидропривод не предлагал?
"Тогда я первым буду!"(с) м/ф "Падал прошлогодний снег" ;D
Суть:
На валу двигателя - гидромотор, второй, соединённый с ним, на приводе крыла. Необходимое передаточное отношение задаётся разностью рабочих объёмов гидромоторов. Можно придумать вариант с гидроцилиндром в качестве привода машущего мех-ма и электромагнитными клапанами, меняющими местами вход и выход приводного гидромотора.
Мощность надо передавать не сильно большую, как я понял, аховых давлений не потребуется, маленькие гиромотор, цилиндр, шланги и пр, врядли будут тяжелее редуктора, а если и будут, то не сильно.
ИМХУ.
"Тогда я первым буду!"(с) м/ф "Падал прошлогодний снег" ;D
Суть:
На валу двигателя - гидромотор, второй, соединённый с ним, на приводе крыла. Необходимое передаточное отношение задаётся разностью рабочих объёмов гидромоторов. Можно придумать вариант с гидроцилиндром в качестве привода машущего мех-ма и электромагнитными клапанами, меняющими местами вход и выход приводного гидромотора.
Мощность надо передавать не сильно большую, как я понял, аховых давлений не потребуется, маленькие гиромотор, цилиндр, шланги и пр, врядли будут тяжелее редуктора, а если и будут, то не сильно.
ИМХУ.
D
DesertEagle
По-моему, тут уже все предлагали, что только возможно 🙂. Мне тоже нравится гидропривод, но у меня нет данных по существующим гидромоторам и гидроцилиндрам малой мощности (~10 л.с.), поиск в интернете не дал полной картины. Лучше конечно подходит пневмопривод, но как выяснилось, в природе не существует воздушных компрессоров с нужной производительностью, а те что есть, весят под 200 кг.telekast сказал(а):Братцы, а никто ещё тут гидропривод не предлагал?
У гидропривода, имхо, есть несколько замечательных качеств. Во-первых, значительно больший кпд гидрокомпрессора. Во-вторых, гидропривод не взрывается как воздух под давлением (правда струйка утечки может отрезать кусок от тела, водорезкой даже металлы режут =)). В-третьих, гидропривод как и пневмопривод по сути представляют собой редуктор с произвольным передаточным числом, чем и ценны в качестве привода для махолета.
Я это представляю как небольшой гидрокомпрессор на валу двигателя, от него шланги к небольшим гидроцилиндрам у основания лонжеронов. Меньшая скорость хода гидроцилиндра в данном случае даже плюс, можно компактнее все разместить. Хотя и возрастут нагрузки на лонжерон. Управление махами вручную с помощью клапанов. Можно на полукрыло два цилиндра и два клапана, и этим управлять углом атаки. Либо один и лонжерон размещать не в передней кромке крыла как в дельтаплане, а дальше по хорде как у самолетов. И махи пусть будут симметричны как у псевдо-ярно, а для полета весь аппарат надо повернуть на положительный угол атаки.
Вот только для гидропривода вроде нужен еще гидроаккумулятор? Хотя по идее должны существовать гидрокомпрессоры, которые не превышают давление сверх максимального. Что-то вроде турбинки как в коробке-автомат машины, которая "прокручивается" при превышении нагрузки.
Короче, я за гидропривод! В крыльях голландца вместо электрического. Если найти подходящие пневмоцилиндры и компрессор, то такой аппарат можно попробовать реализовать. Жаль что я в гидротехнике совершенно не разбираюсь. Тут вроде знатоки говорили, что по массе гидропривод выйдет тяжелее и дороже, чем пневмо. Вот только я не уверен, что говоривший сравнивал корректно, то есть с разными точками приложения усилия на лонжероне. Если пневмовариант - это, образно говоря, встроенные пневмоцилиндры в подкосы самолета, то конечно замена их на гидро будет невыгодна по весу. Но если под гидро понимать ранец как у ярно, с ходом гидроцилиндра около 5 см у основания лонжерона, то за счет размеров гидропривод по идее должен получиться легче, чем большие пневмоцилиндры в подкосах.
Всю конструкцию и переходные элементы можно посчитать на прочность в том же солиде, заказать сложные детали на заводе тоже не проблема. Вся сложность только в том, чтобы найти подходящие гидроцилиндры, гидрокомпрессор и клапана управления.
JohnDoe
Усы-то сбрею, а умище-то куда дену? )))
- Откуда
- где-то в России....
Я же уже давал "наколку" - насосы для гидроусилителя руля автомобилей. Масса невелика(относительно), давления до 100 атм. не редкость.DesertEagle сказал(а):Все это сложно конечно... Но с этим хотя бы можно экспериментировать, в отличие от гидроприводов с высоким давлением в сотни атм, которые даже неизвестно, существуют ли в природе подходящих габаритов и мощности...
Ну если не нравится гидропривод, тогда вот ещё одна "бреднЯ" - использовать в качестве привода соленоид-электромагнит, рабочим органом будет служить подвижный сердечник, если в него "закатать" какой-нить ниодимовый магнит вещь будет просто зверская. Можно через качалку/рычаг для увеличения усилия. Управление - чистая электроника, регулировка амплитуды/частоты просто длительностью импульса и величиной тока/напряжения. Можно юзать суперконденсаторы, они способны выдать огромный импульс тока, лишь бы обмотка выдержала и лонжероны и пр. Заряжаются быстро и пр.
Вполне "рюкзачный" вероянт. 😉
D
DesertEagle
Что-то я ОЧЕНЬ сильно сомневаюсь, что для работы гидроусилителя тратится мощность 10 л.с., отбираемая от двигателя )))). Давление-то он дает, но расход очень маленький. Можно еще для примера взять автомобильный гидравлический домкрат - усилие развивает под 3000 кг, но от мощности всего 200 Вт (если человек весом 75 кг качает его с ходом рычага 20 см, нажимая всем своим весом). Тут вся проблема именно в большой мощности. Можно ли к ним подвести мощность в 10 л.с.... не знаю, от конструкции зависит, выдержит ли она такие обороты. Даже если прочность позволяет, но если кпд не очень высокий, то конструкция будет греться вплоть до раскаления металла докрасна. Потребуется водяное охлаждение, радиаторы и т.д.telekast сказал(а):Я же уже давал "наколку" - насосы для гидроусилителя руля автомобилей. Масса невелика(относительно), давления до 100 атм
Другой пример: возьмем болт М8 со стандартным шагом резьбы 1.25 мм (то есть за один оборот гайка сдвигается по болту на 1.25 мм). Если верить табличке по ссылке, то при классе прочности 8.8 его резьба как раз должна выдерживать нагрузку около 1200 кг. Если теперь мы к гайке приделаем моторчик с оборотами 6000 об/мин (что равно 6000/60=100 Гц), то за одну секунду гайка будет делать 100 оборотов и сдвинется по болту на 100*1.25 мм = 125 мм = 12.5 см.
Но какой мощности нужен мотор, чтобы вращать эту гайку? А это зависит от того, какой вес поднимает шпилька! Если шпилька - это ножка стула, на котором сидит человек массой 75 кг, то это мощность 1 л.с. / (100 см / 12.5 см) = 0.125 л.с. или 92 Вт. То есть для стула, поднимающегося на 12.5 см за 1 сек, достаточно электрического моторчика в 92 Вт.
Но для махолета при том же ходе 12.5 см за 1 сек, нужно поднять 1200 кг! А это мощность (1200 кг / 75 кг) * 0.125 л.с. = 2 л.с.
Это на одно полукрыло, а для двух потребуется, соответственно, мощность 4 л.с. (потому что тяговое усилие 1200 кг мы выше выбрали для ранцевого варианта как у ярно, что по расчету для горизонт. полета требует около 5 л.с.).
Если вы можете себе представить гайку, накручивающуюся на болт со скоростью 100 оборотов в секунду 🙂, то вот вам готовый редуктор для ранца как у ярно =). Однако боюсь, что даже со смазкой потери на трение будут огромными, например при кпд 50% он будет греться как электрочайник, можно воду кипятить =), а движок соответственно потребуется в два раза мощнее, чтобы компенсировать эти потери. С другой стороны, если поиграться с диаметром болта и шагом резьбы, а также вместо гайки использовать шестеренку, которая будет связана с шестеренкой на валу двигателя, чтобы крутилась хотя бы в 5 раз медленнее вала двигателя, то с этим уже что-то может получиться.... Надо считать. У ранцевого махолета нагрузки и мощности не такие уж большие по сравнению с самолетным махолетом.
Вот тут есть программка для расчета соленоида: http://imlab.narod.ru/M_Fields/M_Drive/M_Drive.htm. Можно указывать диаметры катушек, разные типы магнитов и т.д. На выходе развиваемое соленоидом усилие в кг и потребляемая мощность в Вт. Мне лично не удалось подобрать приемлимые габариты соленоида, чтобы при ходе около 10 см развивалось усилие 1200 кг и потребляемая мощность была хотя бы 2 л.с. (но для нормального полета лучше 5 л.с.). Это на одно крыло, для двух соотв. нужны два таких соленоида. Может вам повезет больше, удачи =).telekast сказал(а):использовать в качестве привода соленоид-электромагнит
DesertEagle сказал(а):Итак, цена и вес двух
=винт с гайкой =намного легче,простше и эффективнее...
http://www.penskeshocks.com/PRESS_2008-08-19.php
D
DesertEagle
Соглашусь, но хотелось бы цифр и примеров - какое усилие, длина хода, передаваемая мощность? Имеем двигатель с оборотами 5000 об/мин (или с редуктором 2500 об/мин) и мощностью 8 л.с.. Нужно преобразовать это движение в ход 15 см за 1 сек с усилием 1200 кг. Ну или в другую подходящую для махолета кинематику. Я не призываю использовать какой-то определенный тип привода и не утверждаю, что какой-то самый лучший. А просто ищу РЕАЛЬНЫЕ варианты реализации. Вот о гидроприводе на этой ветке говорилось чуть ли не с первых страниц, но что-то я не припоминаю названий насосов или марок нужных гидроцилиндров. И с какими двигателями их компоновать, совпадают ли их номинальные обороты например. Кстати, если верить вот этим данным, то один гидроцилиндр с похожими характеристиками (давление 100 атм, диам. 40 мм, ход 105 мм и усилием 1200 кг) весит весит 4.25 кг. А нужно два, это +8.5 кг к массе. С гидроприводом ранцевый махолет пока не получается....henryk сказал(а):=винт с гайкой =намного легче,простше и эффективнее...
http://www.akcesoria.cnc.info.pl/sruby_kulowe_rexroth.htm
http://www.akcesoria.cnc.info.pl/pliki/srubykulowe/hv/mechanizmy_srubowo_toczne.pdf
=КПД ок.98%
http://www.stoeber.pl/files/File/neff_Data_sheet_komplet_Katalog-eng.pdf?PHPSESSID=0652bb56d67dd9088aab5f946fa08c1f
-na anglickom.
http://www.akcesoria.cnc.info.pl/pliki/srubykulowe/hv/mechanizmy_srubowo_toczne.pdf
=КПД ок.98%
http://www.stoeber.pl/files/File/neff_Data_sheet_komplet_Katalog-eng.pdf?PHPSESSID=0652bb56d67dd9088aab5f946fa08c1f
-na anglickom.
D
DesertEagle
Похоже что FEM-E-C 16х5 годится, C dyn. 1230 кг - это макс. развиваемое усилие в направлении оси? Если так, то все ок, потому что ниже у них обозначена скорость 30 м/мин (0.5 м/сек). Только непонятно, такая макс. скорость допустима под нагрузкой 1230 кг или только при холостом ходе. И самое главное, непонятно какой шаг, 5 мм в обозначении? Потому что от этого напрямую зависит какой на двигатель нужен редуктор. Но в целом, шариковые направляющие выглядят заманчивым вариантом привода, спасибо за ссылку.henryk сказал(а):http://www.akcesoria.cnc.info.pl/sruby_kulowe_rexroth.htm
А возвращаясь к приводу на основе мотопомпы, вместо клапанов можно использовать простое перегибание шланга. Сделать качалки, связанные с махами и перегибающие в нужные моменты входные и выходные шланги... А в качестве подушек можно использовать склеенные циакрином автомобильные камеры, они как раз рассчитаны на штатное давление 2 атм.
Чтобы перегнуть шланг диаметром 5 см с внутренним давлением 2 атм, понадобится момент не менее 1.57 * 2 атм * 100 000 * (0.025 м ^3) = 4.90625 Н*м. Так как у нас 4 подушки с двумя шлангами на каждой (вход-выход), то на управление перегибанием шлангов при частоте махов 1 Гц будет тратиться мощность от двигателя N = 4.90625 Н*м * 8 * 1 Гц = 39.25 Вт. Не так уж много, приемлимо. На шаровых кранах получится не меньше из-за большой силы трения в кранах. А с перегибанием шлангов частота махов неограничена. Краны из-за трения могут перегреваться и клинить при большой частоте переключений.
Таким образом, привод махолета на основе мотопомпы сводится к выбору конструктивного расположения резиновых подушек нужной площади в корне крыльев (или даже пожарные шланги в ряд для набора нужной площади) и созданию качалок, которые будут надежно перегибать шланги в зависимости от текущего угла лонжерона. И все, готов простейший и надежный привод с огромным ресурсом. Покупаем мотопомпу, хомутиками крепим на нее шланги, ставим расширительный бак с водой и можно лететь =).
А что касается классического гидропривода с высоким давлением под 150 атм, то существуют поворотные гидроцилиндры. Если найти подходящий по параметрам (давление 150 атм, момент 250 кг*м, скорость поворота 60 град/сек), то можно лонжероны крепить прямо к нему и не мучаться с поршневыми гидроцилиндрами. Но поиск в интернете таких поворотных пока ничего не дал, видимо это большая редкость.
И еще один момент по поводу правильных махов при простейшем колебательном движении лонжерона вверх-вниз, на котором хотелось бы остановиться. Многие махолетчики совершают ошибку, размещая лонжерон в передней кромке крыла. Да, это в принципе работает, но машущее крыло без активного изменения угла атаки по определению однорежимное. Нужно чтобы каждое сечение крыла двигалось под правильным углом к потоку, например +15 град при махе вниз и 0 при махе вверх. Или симметрично при активном махе вверх. Но угол набегания на крыло зависит от: а) скорости полета, б) вертикальной скорости крыла. А вертикальная скорость каждого участка крыла зависит от: а) размаха крыла, б) амплитуды махов, с) частоты махов. Поэтому даже при изменении скорости полета такое крыло может перестать работать эффективно, не говоря о разных комбинациях размаха/амплитуды/частоты и формы крыла в плане (длин хорд сечений).
А часто можно видеть (на модельках например), что лонжерон в передней кромке вроде изменяет крутку крыла, но крыло даже визуально машет как-то неправильно. А причина этого в том, что на поворот крыла вокруг оси (изменение угла атаки) при лонжероне в передней кромке может тратиться энергия намного меньше, чем та что должна тратиться на мах. Получается, что крыло быстро повернулось и далее движется с околонулевым углом атаки. Махи есть, а тяги и подъемной силы нет! И так как на многих полноразмерных проектах я не вижу учета этого фактора, то подозреваю что их авторы на это не обращают внимания, а видимо надеятся на удачу, что установки каждого сечения при махах сами-собой как-нибудь совпадут с оптимумом. Но надеяться на это слишком самонадеянно, имхо...
А решение есть очень простое: достаточно задать в конструкции возможность смещать нервюры на лонжероне вдоль хорды. Тогда ставим все нервюры по умолчанию, снимаем на видео взмахи, находим углы сечений. Там где они неправильные, сдвигаем эти нервюрки по хорде, испытываем снова. При этом каждый раз будет уплывать центровка, поэтому в конструкции также должно быть предусмотрено ее изменение. Но это, имхо, самый простой способ подобрать углы установки сечений при махах на одном крыле, не переделывая крылья заново. Частично этот эффект можно повторить регулируемым натяжением задней кромки например. Но насколько я понимаю, натяжение кромки не покроет весь диапазон регулировок, который нужен. При изменении натяжения кромки нужно еще менять длины хорд отдельных сечений, а это на готовом крыле невозможно.
DesertEagle сказал(а):использовать простой КШМ?
-имея в распоряжении 2 пары линейных привода\Х-У\ на шариковых гайках можно постараться сделать полностью управляемое сервомеханизмом крылья,следящие за движением руки.
D
DesertEagle
Камень в огород lav и всех поклонников нестационарности при махах скорее этот документ: Flapping flight aerodynamics for flying animals.pdf (внизу ссылка на pdf, на след. странице нажать Agree для скачки).
Если коротко, то сделали машущий стенд с размахом 1.3 м, удлинением 8.6, амплитудой махов 60 градусов и частой около 1 Гц. То есть примерно как у птиц среднего размера. И продували в аэродинамической трубе с разными профилями, с разными крутками и режимами махов.
Параллельно эту же модель рассчитывали VLM методом (метод дискретных вихрей, одна из наиболее точных теорий в стационарной аэродинамике).
Инструментарий достаточно серьезный, измерялась инерция на крыльях, измерялась скорость воздуха над крылом для определения моментов срыва потока и т.д.. На картинке ниже не результат симуляции, а результат реального измерения лазером или как они там сейчас это делают. Обработанного потом на компьютере разными цветами и с дорисованными стрелками.

Ну а результаты сравнения эксперимента и теории я уже как-то тут выкладывал. Пунктиром результат продувки в реальной трубе, сплошной линией теоретический расчет.

Как видите, совпадение теории и практики весьма и весьма неплохое. И, заметьте, это в размере утки/гуся с их низкими числами рейнольса, где нестационарность должна намного сильнее влиять, чем в полноразмерном аппарате! На практике же нестационарные эффекты судя по графикам скорее мешают, так как результат продувки оказался немного хуже расчета (меньше тяга и меньше подъемная сила, чем предсказываемые теорией).
Поэтому из аналитических методов для расчета махолета сейчас самый лучший VLM (он же панельный, есть несколько мелких модификаций с разными названиями). Лучше него только прямая численная симуляция методом конечных элементов. Но она слишком долгая, поэтому оптимизировать крыло невозможно. А VLM считается за несколько секунд и с ним можно применять различные методы оптимизации. Да и просто сделать множество расчетов на слабеньком компьютере с разными параметрами типа частоты махов, площади крыла и т.д.
Однако для машущего полета подходящих программ с VLM пока нет. Есть только для планеров. Можно написать свою, это не очень сложно, в сети есть примеры и исходники. Кого действительно интересует достаточно точный расчет махолетов (курсовая, диплом и т.д.), можете заняться, лучше этого пока ничего не придумано. Меня-то лично устраивает и экселевское приближение ). Имхо, точность при изготовлении и погрешности в аэродинамике от гибкости крыльев, перекроют разницу в точности от разных методов расчета.
Кстати, интересный нюанс: там испытывались махи без изменения угла атаки при махах (просто вверх-вниз плоское крыло) и с изменением. Так вот, им не удалось на практике получить тягу при махах без поворота крыла, хотя 2D теория говорит что это возможно. Тут на ветке я раньше рисовал принцип. Очевидно, что дело в индуктивном сопротивлении (которое в 2D не учитывается). С другой стороны, этот режим очень сильно зависит от скорости полета, поэтому при других условиях может и получилось бы.
С изменением угла атаки при махах нет проблем.
Также благодаря возможности видеть срыв потока, они испытывали махи со срывным обтеканием (привет всем, кто уверен что без этого не обойтись, хе-хе). Максимальный Cy крыла действительно значительно повышался, вплоть до 1.8-2 единиц. А вовсе не 3-5 единиц, как думают некоторые. Впрочем, это можно списать на несовершенство крыла модели, у птиц аэродинамика более оптимизирована эволюцией. Но в любом случае, это только в определенный момент на махе вниз, а не средний Cy за вес полет, смотрите графики в статье.
При безотрывном обтекании максимальный Cy на особо удачном режиме 0.8, а так 0.4-0.6.
При этом если используется отрывное обтекание, то удается развить большую подъемную силу, но существенную тягу получить не удается. А на безотрывном (читайте - стационарной аэродинамике) можно получить большую тягу, но подъемная сила получается в пределах, предсказываемых стационарной аэродинамикой.
Поэтому в статье делается вывод, что отрывное нестационарное обтекание выгодно использовать на старте, пока скорость невелика и не нужна большая тяга. А в крейсерском режиме лучше перейти на безотрывное, так как большая скорость требует больше тяги. Напомню, это результат практических продувок в трубе модели птичьей размерности, а не теоретические изыскания.
Какое отношение этот вывод имеет к полноразмерному махолету? А что у нас самая большая проблема в нашем размере? Тяга. Так что в полноразмерном махолете надо максимально устранять любые нестационарные эффекты (отрывное обтекание и прочее) и добиваться максимального приближения к стационарной аэродинамике. Тогда и тяга будет достаточная, и подъемной силы хватит на типичных человеческих крыльях типа дельтапланов и парапланов.
В общем, почитайте сами, интересно. Там много графиков и цифр, это одна из серьезнейших работ по машущему полету. Я имею ввиду сравнения теории и практики, а не чистая теория.
Если коротко, то сделали машущий стенд с размахом 1.3 м, удлинением 8.6, амплитудой махов 60 градусов и частой около 1 Гц. То есть примерно как у птиц среднего размера. И продували в аэродинамической трубе с разными профилями, с разными крутками и режимами махов.
Параллельно эту же модель рассчитывали VLM методом (метод дискретных вихрей, одна из наиболее точных теорий в стационарной аэродинамике).
Инструментарий достаточно серьезный, измерялась инерция на крыльях, измерялась скорость воздуха над крылом для определения моментов срыва потока и т.д.. На картинке ниже не результат симуляции, а результат реального измерения лазером или как они там сейчас это делают. Обработанного потом на компьютере разными цветами и с дорисованными стрелками.
Ну а результаты сравнения эксперимента и теории я уже как-то тут выкладывал. Пунктиром результат продувки в реальной трубе, сплошной линией теоретический расчет.
Как видите, совпадение теории и практики весьма и весьма неплохое. И, заметьте, это в размере утки/гуся с их низкими числами рейнольса, где нестационарность должна намного сильнее влиять, чем в полноразмерном аппарате! На практике же нестационарные эффекты судя по графикам скорее мешают, так как результат продувки оказался немного хуже расчета (меньше тяга и меньше подъемная сила, чем предсказываемые теорией).
Поэтому из аналитических методов для расчета махолета сейчас самый лучший VLM (он же панельный, есть несколько мелких модификаций с разными названиями). Лучше него только прямая численная симуляция методом конечных элементов. Но она слишком долгая, поэтому оптимизировать крыло невозможно. А VLM считается за несколько секунд и с ним можно применять различные методы оптимизации. Да и просто сделать множество расчетов на слабеньком компьютере с разными параметрами типа частоты махов, площади крыла и т.д.
Однако для машущего полета подходящих программ с VLM пока нет. Есть только для планеров. Можно написать свою, это не очень сложно, в сети есть примеры и исходники. Кого действительно интересует достаточно точный расчет махолетов (курсовая, диплом и т.д.), можете заняться, лучше этого пока ничего не придумано. Меня-то лично устраивает и экселевское приближение ). Имхо, точность при изготовлении и погрешности в аэродинамике от гибкости крыльев, перекроют разницу в точности от разных методов расчета.
Кстати, интересный нюанс: там испытывались махи без изменения угла атаки при махах (просто вверх-вниз плоское крыло) и с изменением. Так вот, им не удалось на практике получить тягу при махах без поворота крыла, хотя 2D теория говорит что это возможно. Тут на ветке я раньше рисовал принцип. Очевидно, что дело в индуктивном сопротивлении (которое в 2D не учитывается). С другой стороны, этот режим очень сильно зависит от скорости полета, поэтому при других условиях может и получилось бы.
С изменением угла атаки при махах нет проблем.
Также благодаря возможности видеть срыв потока, они испытывали махи со срывным обтеканием (привет всем, кто уверен что без этого не обойтись, хе-хе). Максимальный Cy крыла действительно значительно повышался, вплоть до 1.8-2 единиц. А вовсе не 3-5 единиц, как думают некоторые. Впрочем, это можно списать на несовершенство крыла модели, у птиц аэродинамика более оптимизирована эволюцией. Но в любом случае, это только в определенный момент на махе вниз, а не средний Cy за вес полет, смотрите графики в статье.
При безотрывном обтекании максимальный Cy на особо удачном режиме 0.8, а так 0.4-0.6.
При этом если используется отрывное обтекание, то удается развить большую подъемную силу, но существенную тягу получить не удается. А на безотрывном (читайте - стационарной аэродинамике) можно получить большую тягу, но подъемная сила получается в пределах, предсказываемых стационарной аэродинамикой.
Поэтому в статье делается вывод, что отрывное нестационарное обтекание выгодно использовать на старте, пока скорость невелика и не нужна большая тяга. А в крейсерском режиме лучше перейти на безотрывное, так как большая скорость требует больше тяги. Напомню, это результат практических продувок в трубе модели птичьей размерности, а не теоретические изыскания.
Какое отношение этот вывод имеет к полноразмерному махолету? А что у нас самая большая проблема в нашем размере? Тяга. Так что в полноразмерном махолете надо максимально устранять любые нестационарные эффекты (отрывное обтекание и прочее) и добиваться максимального приближения к стационарной аэродинамике. Тогда и тяга будет достаточная, и подъемной силы хватит на типичных человеческих крыльях типа дельтапланов и парапланов.
В общем, почитайте сами, интересно. Там много графиков и цифр, это одна из серьезнейших работ по машущему полету. Я имею ввиду сравнения теории и практики, а не чистая теория.
D
DesertEagle
Вот еще один простой альтернативный способ оценить необходимую махолету мощность. Им я пользовался до того, как написал программу с полным аэродинамическим расчетом и определением мощности на махи исходя из него.
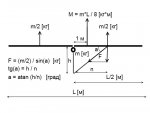
Подъемная сила по определению должна быть равна взлетному весу махолета, пусть m=100 кг. Значит каждое полукрыло создает подъемную силу по 50 кг. Заменим ее равнодействующим вектором 50 кг (~500 Н), расположенным на середине каждого полукрыла. Это обычная практика при упрощенном расчете изгибающего момента на крыльях для определения необходимой прочности лонжерона.
Пусть размах махолета L=10 м, тогда момент на одном полукрыле M = m*L/8 = 125 кг*м. Таким образом, для маха привод должен создавать на каждом полукрыле момент 125 кг*м. Ну а потребляемая мощность будет определяться скоростью, с какой мы хотим махать крылом, по формуле P = M*w, где М - момент, w - угловая скорость, рад/с. Например если мы хотим махнуть этим крылом на 60 градусов за 1 сек, то угловая скорость w = (60 град * 3.14/180)/1 сек = 1.047 рад/с. И мощность на один мах вниз равна P = 1250 Н*м * 1.047 рад/с = 1308 Вт.
Но это одно полукрыло, а вторым ведь тоже надо махать. Поэтому в итоге на один мах нужен мотор мощностью P = 1308*2 = 2616 Вт = 3.6 л.с.
А какое снижение у нас имеют дельтапланы с таким же крылом размахом 10 м? Примерно -1.5 м/с, значит в безмоторном полете гравитация дает для полета мощность P = F*v = 1000 Н * 1.5 м/с = 1500 Вт. Вот и получается, что кпд нашего машущего полета 1500/2616 = 57%. Примерно как у винта на мотоподвеске для такого дельтаалана.
Но это очень грубая прикидка, не привязываясь к аэродинамике. И это средняя мощность мотора при активном махе вверх (для второго режима махов). А если хотим крылья дергать только вниз, а вверх чтобы они поднимались сами, то мотор соответственно должен быть удвоенной пиковой мощности, так как половину времени будет простаивать на махе вверх. То есть около 7.2 л.с. для горизонтального полета и 14.4 л.с. для набора высоты со скороподъемностью 1.5 м/с.
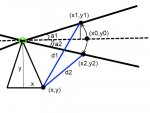
Можно пойти дальше и найти с какой силой нужно тянуть боковой трос дельтаплана, чтобы совершать махи. Тогда мощность на махи будет вычисляться по формуле P = F*v, где F - усилие на тросе в Ньютонах, v - скорость сматывания троса. Результат в Ваттах. Это просто другой вид формулы мощности, тот был для вращательногго движения, а этот для линейного.
Я нарисовал ниже схему с формулами для облегчения. Для реальной дельтапланерной трапеции конечно придется посчитать точнее (второй рисунок). Найдя разницу между длиной троса d1 в верхней точке маха и d2 в нижней, узнаем какую длину троса нужно смотать. Ну или на сколько должна сократиться пневмомышца, если хотим использовать ее вместо электролебедки. А из частоты махов знаем скорость, с какой мы должны эту длину смотать/укоротить. Получаем скорость. Усилие на тросе уже знаем, так что получаем необходимую мощность на такое сматывание троса, а по сути мощность на махи крылом.
Делая поправки на погрешности и допущения, так и так выходит что машущий дельтаплан мог бы летать от мотора мощностью около 8-10 л.с., а для уверенного набора нужно около 15 л.с., как и в мотоподвеске. Ну а бегать и делать подпрыги на первом прототипе можно начиная с мощности где-то 5 л.с., это уже будет чувствоваться тяга, может даже удастся немного пролететь в горизонте.
Ну и где тут сильно уступающая эффективность машущего полета винту? ) Из самый пессимистичных прикидок выходит, что ранцевый махолет целесообразен и будет не хуже имеющихся легких ЛА. Другое дело, что сделать привод с хорошим кпд это сама по себе большая проблема (я бы даже сказал, главная проблема). Редуктор-то для винта имеет кпд под 95-98% и весит в дельтапланерной/парапланерной размерности всего 1.5 кг... Ну и еще 5 кг кольцо ограждения (или моторама в случае мотоподвески), правда.
Подъемная сила по определению должна быть равна взлетному весу махолета, пусть m=100 кг. Значит каждое полукрыло создает подъемную силу по 50 кг. Заменим ее равнодействующим вектором 50 кг (~500 Н), расположенным на середине каждого полукрыла. Это обычная практика при упрощенном расчете изгибающего момента на крыльях для определения необходимой прочности лонжерона.
Пусть размах махолета L=10 м, тогда момент на одном полукрыле M = m*L/8 = 125 кг*м. Таким образом, для маха привод должен создавать на каждом полукрыле момент 125 кг*м. Ну а потребляемая мощность будет определяться скоростью, с какой мы хотим махать крылом, по формуле P = M*w, где М - момент, w - угловая скорость, рад/с. Например если мы хотим махнуть этим крылом на 60 градусов за 1 сек, то угловая скорость w = (60 град * 3.14/180)/1 сек = 1.047 рад/с. И мощность на один мах вниз равна P = 1250 Н*м * 1.047 рад/с = 1308 Вт.
Но это одно полукрыло, а вторым ведь тоже надо махать. Поэтому в итоге на один мах нужен мотор мощностью P = 1308*2 = 2616 Вт = 3.6 л.с.
А какое снижение у нас имеют дельтапланы с таким же крылом размахом 10 м? Примерно -1.5 м/с, значит в безмоторном полете гравитация дает для полета мощность P = F*v = 1000 Н * 1.5 м/с = 1500 Вт. Вот и получается, что кпд нашего машущего полета 1500/2616 = 57%. Примерно как у винта на мотоподвеске для такого дельтаалана.
Но это очень грубая прикидка, не привязываясь к аэродинамике. И это средняя мощность мотора при активном махе вверх (для второго режима махов). А если хотим крылья дергать только вниз, а вверх чтобы они поднимались сами, то мотор соответственно должен быть удвоенной пиковой мощности, так как половину времени будет простаивать на махе вверх. То есть около 7.2 л.с. для горизонтального полета и 14.4 л.с. для набора высоты со скороподъемностью 1.5 м/с.
Можно пойти дальше и найти с какой силой нужно тянуть боковой трос дельтаплана, чтобы совершать махи. Тогда мощность на махи будет вычисляться по формуле P = F*v, где F - усилие на тросе в Ньютонах, v - скорость сматывания троса. Результат в Ваттах. Это просто другой вид формулы мощности, тот был для вращательногго движения, а этот для линейного.
Я нарисовал ниже схему с формулами для облегчения. Для реальной дельтапланерной трапеции конечно придется посчитать точнее (второй рисунок). Найдя разницу между длиной троса d1 в верхней точке маха и d2 в нижней, узнаем какую длину троса нужно смотать. Ну или на сколько должна сократиться пневмомышца, если хотим использовать ее вместо электролебедки. А из частоты махов знаем скорость, с какой мы должны эту длину смотать/укоротить. Получаем скорость. Усилие на тросе уже знаем, так что получаем необходимую мощность на такое сматывание троса, а по сути мощность на махи крылом.
Делая поправки на погрешности и допущения, так и так выходит что машущий дельтаплан мог бы летать от мотора мощностью около 8-10 л.с., а для уверенного набора нужно около 15 л.с., как и в мотоподвеске. Ну а бегать и делать подпрыги на первом прототипе можно начиная с мощности где-то 5 л.с., это уже будет чувствоваться тяга, может даже удастся немного пролететь в горизонте.
Ну и где тут сильно уступающая эффективность машущего полета винту? ) Из самый пессимистичных прикидок выходит, что ранцевый махолет целесообразен и будет не хуже имеющихся легких ЛА. Другое дело, что сделать привод с хорошим кпд это сама по себе большая проблема (я бы даже сказал, главная проблема). Редуктор-то для винта имеет кпд под 95-98% и весит в дельтапланерной/парапланерной размерности всего 1.5 кг... Ну и еще 5 кг кольцо ограждения (или моторама в случае мотоподвески), правда.
Вложения
D
DesertEagle
Отсюда: http://ornithopter.net/research_e.html, конкретно аэродинамическая модель расчета описана здесь: An Aerodynamic Model for Flapping-Wing Flight (PDF). Это то, что они использовали при аэродинамическом расчете своего моторного махолета. Это стационарная теория, немного модицифированная, но по сути не сильно отличающаяся от того что мы тут считали выше в экселе. Так же крыло разбивается на несколько участков и для каждого находятся элементарные вектора сил.Fan-Fen2 сказал(а):Если можно - дайте ссылку.

Там и остальные PDF'ки полезно прочитать, о том как они рассчитывали пассивную скрутку крыла при махах, о результатах замера реальной тяги и сравнения ее с теорией. Достоинство в том, что все это проверено на полноразмерном махолете.
Разговоры сводятся к тому, что некоторые) обещают летные характеристики махолета выше, чем предсказывает стационарная (квазистационарная) теория, а доказать этого цифрами не могут 🙂Fan-Fen2 сказал(а):Для этого и предлагается перейти от слов к цифрам. От разговоров халва слаще не становится.
За одним исключением, где логика не противоречит физике (но противоречит стационарной ародинамике). Но там весь расчет строится на том, что у птиц мышцы по удельной мощности равны человеческим. А это не так, согласно данным орнитологов, у птиц благодаря улучшенной системе дыхания (снабжения крови кислородом) и сердцебиения (кровь быстрее доставляет кислород к мышцам), удельная мощность в несколько раз выше, чем у человека. Особенно пиковая, необходимая при взлете и больших нагрузках. Если использовать эти данные о мощности, полученные от орнитологов, а не от сравнения со средним нетренированным человеком, то птичьи летные параметры примерно сходятся с результатами расчета по квазистационарной аэродинамике. Примеры расчетов, сравнения и т.д. тут уже были на ветке, просто сейчас их уже сложно найти, слишком много страниц назад.
Подытоживая, все хорошо! ) С учетом всех негативынх факторов, в том числе описываемых Anatoliy, ранцевому махолету типа дельтаплана, для горизонтального полета согласно расчетам потребуется мотор мощностью 6-10 л.с., в зависимости от того, будет ли мах вверх принудительным или пассивным под набегающим потоком. А экспериментировать можно начиная с 3-5 л.с., для подскоков должно хватать. Но это с чистой мощностью на крыле после редуктора. А редуктор может съесть 30-60% мощности легко (например, если это пневматический привод). Тогда движок нужен в два-три раза мощнее. Но механические редукторы вполне могут иметь кпд под 90% (например планетарные или волновые), или гидравлика под 80%.
Так что делать однозначно есть смысл. Но над конструкцией, упрощением и деталями, еще нужно подумать... Я лично считаю, что проще всего использовать авиамодельные электромоторы 5-10 кВт и батарейки на 5-10 минут полета. Из-за малого веса и возможности управления/остановки нажатием кнопки. А как их применить - на обычном редукторе с КШМ, наматывая трос на вал как в электролебедке, или даже напрямую скручивая валом два параллельных боковых троса (кпд ~30%), это пока обсуждаемо.
D
DesertEagle
Наверное, самый идеальный вариант. Я тоже время от времени пытался придумать складной вариант жестких крыльев (планирующих). Но так и не удалось найти конструкцию с размахом хотя бы 8 метров. Меньше для старта с ног нецелесообразно, имхо. И массой меньше 30 кг...KV1237542 сказал(а):Я вот и занимаюсь жестким складным крылом с управляемыми шарнирами с приводом от пневмомышц - этакий большой рюкзак, расправил и вперед.
Например вот такая конструкция получается складывающейся и довольно простой в изготовлении. Но из-за соединений и прочности получается тяжелее дельтаплана... 🙁



D
DesertEagle
Логика работы понятна, тут уже скорее нужно вести речь о реализации. Вы прикидывали прочность такого шарнирного соединения? Все таки махать целым крылом почти за корень это непростая задача. И если говорить о свободнонесущих крыльях, то имхо один из самых простых вариантов сделать лонжерон - это делать его из пенопласта нужной формы (сужающийся к концу) и обклеивать стеклотканью. Тогда в качестве шарнира может выступать килевая труба. Вставленная в отверстие в корневой части лонжерона. Немного смазки и все это должно более менее нормально работать, для прототипа сойдет. Сорри за корявость рисунка. Мачта и остальные растяжки от трапеции не показаны.KV1237542 сказал(а):На взлет форсаж – только работа впуска – т.е. клапан может быть открыт все время при махе вниз но теряется работа расширения воздуха

Может нечто подобное сделать и в вашем варианте? Сформовать на лонжеронах выступы, за которые будут попеременно тянуть пневмомышцы. Такой лонжерон в корне можно по бокам усилить приклееными листами фанеры (или металла), как это сделано на многих самолетах, SkyPup в частности:

Главное, что этот способ позволяет неограниченно играть со строительной высотой лонжерона, плюс довольно просто получить длинные 5-6 м полулонжероны крыльев.
KV1237542
Я люблю строить самолеты!
DesertEagle сказал(а):Наверное, самый идеальный вариант. Я тоже время от времени пытался придумать складной вариант жестких крыльев (планирующих). Но так и не удалось найти конструкцию с размахом хотя бы 8 метров. Меньше для старта с ног нецелесообразно, имхо. И массой меньше 30 кг...
Да большая головная боль, я менял концепцию складывания несколько раз, пересчитывал моменты, нагрузки в шарнирах и тд
DesertEagle сказал(а):Вы прикидывали прочность такого шарнирного соединения? Все таки махать целым крылом почти за корень это непростая задача. И если говорить о свободнонесущих крыльях,
Да и неоднократно, тут огрызок старого расчета выкладывал недавно, многое поудалял, результаты в голове, раз пока не строю конкретней не акцентируюсь на этом: худший случай висение - момент от аэро сил примерно равен моменту от инрционных в корне крыла, для крыла с размахом 8,5 - 9 м что-то около 450...500 кг*м, для материала правда принимал углепластик но учитывал усталостную прочность
Для горизонтального можно и поменьше, вообщем расчет на перегрузку +6/- 4 для горизонта скорее всего подойдет, особенно если не расчитывать по пределу усталости
KV1237542
Я люблю строить самолеты!
Выложу мои прикидки размеров крыла, пока без деталей как сделать, а просто с точки зрения обеспечения мах размаха площади при мин габаритах в сложенном виде
Я думал больше применять готовые полуфабрикаты пластиков (ДСП-а или что вообще удасться найти идеально углепластиковый ламинат) для верхних и нижних полок, шарниры делаются зацело с полкой лонжерона, а шарниры делать на фторопластовых подшипниках большого диаметра, конструкция напоминает шарнир для крыла с изменяемой стреловидностью (книга Гребеньков конструкция самолетов)
Я думал больше применять готовые полуфабрикаты пластиков (ДСП-а или что вообще удасться найти идеально углепластиковый ламинат) для верхних и нижних полок, шарниры делаются зацело с полкой лонжерона, а шарниры делать на фторопластовых подшипниках большого диаметра, конструкция напоминает шарнир для крыла с изменяемой стреловидностью (книга Гребеньков конструкция самолетов)
Вложения
Поделиться: