Григунчик, ты же знаешь, если я всерьез возьмусь за тебя, то размажу по стенке, как это уже не раз было. Уж в чем в чем, а в аэродинамике я в отличие от тебя, подкован. Скажи спасибо, что мне просто мараться об тебя брезгливо.Идиотик! Найди ХРЕСТОМАТИЙНУЮ картинку из "Динамики полёта"
Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Примечание: This feature may not be available in some browsers.
Вы используете устаревший браузер. Этот и другие сайты могут отображаться в нем неправильно.
Необходимо обновить браузер или попробовать использовать другой.
Необходимо обновить браузер или попробовать использовать другой.
Влияние "реактивного момента" и "гироскопической устойчивости на телегу.
Григунчик, ты же знаешь,[highlight] если я всерьез возьмусь за тебя, то размажу по стенке,[/highlight] как это уже не раз было. Уж в чем в чем, а в аэродинамике я в отличие от тебя, подкован. [highlight]Скажи спасибо, что мне просто мараться об тебя брезгливо[/highlight].[highlight]Идиотик! Найди ХРЕСТОМАТИЙНУЮ картинку из "Динамики полёта" [/highlight]
Ой! Ты уже ПОСЧИТАЛ - НЕОБХОДИМЫЙ прирост тяги в зависимости от веса ЛА...?!!! 🙂
[highlight]Размачик-штукатурщик - "грозный."..! [/highlight] ;D ;D ;D ;D
[highlight]Дебил лает, умный молчит[/highlight] :о)
Григушка, мне просто достоинство не позволяет опускаться до твоего помойного уровня и устраивать с тобой срач, так что гавкай дальше. [highlight]жалкое обиженное на весь мир создание, это единственное, на что у тебя хватает ума [/highlight]:о)
Санчик, что делать будешь, когда Сергей в ОЧЕРЕДНОЙ РАЗ своим видеороликом - ПОДТВЕРДИТ(!).... - МОЮ ПРАВОТУ(!)...?!! ;D ;D ;D
В очередной раз - завопишь, что "...это Григ - перевёртыш(!!! ) 😡, а я, санчик - непризнанное ЗАЙКО :'( ...!!!"....?!! 😉
1. [highlight]В ста случаях, когда ты будешь в горизонте отклонять пластину В ГОРИЗОНТЕ с брошенной ручкой, крыло пойдёт у тебя В СТОРОНУ пластины-ОБТЕКАТЕЛЯ-ТЕЛЕГИ...!!!![/highlight]
2. В ста случаях, когда ты будешь в КРЕНЕ СО СКОЛЬЖЕНИЕМ с брошенной ручкой ( НОРМАЛЬНЫЕ пилоты этого - НЕ ДОПУСКАЮТ и ОТДАЮТ в это время ручку!) отклонять пластину (В КРЕНЕ - больше 25-30 градусов), крыло пойдёт у тебя - ПРОТИВ пластины...!!!!
НЕ ПУТАЙ два процесса...!!!
3. Сергей, если ты - НЕ ПЕРЕСТАНЕШЬ ЛОМАТЬ узел подвеса телеги своим ДУРАЦКИМ "гениальным изобрЕтеньем", ты, ОБЯЗАТЕЛЬНО(!!!) его - СЛОМАЕШЬ(!!!) рано, или поздно, и - ГРОБАНЁШЬСЯ..!!! 😡 😡 😡
[highlight]Могу утверждать ВСЕ ТРИ пункта!!!
Могу принимать ЛЮБЫЕ пари на ОБА ПЕРВЫХ пункта!!![/highlight]
[highlight]Санчик - БОЛТУН и 13,4@ДОБОЛ...!!! [/highlight] :IMHO
Это Вы напрасно. Мои ответы на Ваши вопросы будут полезны для Вас, а Ваша критика будет полезна для меня.Прошу Вас, не воспринемайте это как критику
Над этим знаменателем я уже думал. При подстановке реальных значений знаменатель всегда получается положительный. Он стремится к нулю, когда вес телеги уменьшается и становится равным kX . Это означает, что перевысить крен невозможно ничем. Понятно, что такая ситуация не соответствует реальности, потому что невозможность исправить крен наступит гораздо раньше. Скорее всего это издержки линейности моих формул. На самом деле всё сложнее.
Второе. Если Су = kCx? То Су + с[sub]у[/sub] = kСх + kс[sub]х[/sub] . Т.е. изменение сопротивления крыла однозначно определяет изменение подъёмной силы через качество. Другой связи между ними нет. Любой выделенный элемент крыла имеет свои сопротивление и подъёмную силу. Расстояние от элемента до оси крыла одно и тоже для этих сил, а значит и момент их также связан через k.
Вы предлагаете решить динамическую задачу, которая опишет переходный ускоренный процесс. Во-первых, это сложная задача, во-вторых, мы не найдём нужных нам параметров. Поэтому я, как и Grig, предлагаю найти ограничения практическим путём. В частности, я считаю, что параметр начального равновесного отклонения телеги b однозначно указывает на возможность кирдыка.
Третье. Площадь боковой поверхности телеги я взял из таблицы Грига. Она тут где-то недалеко. Но это не принципиально. У нас ещё есть неизвестный параметр Су. Главное, что косое обтекание телеги создаёт заметный крутящий момент, который значительно смещает вбок телегу и создаёт этим аномальный крен.
Спасибо за вопросы. До завтра.
Григунчик, ты же знаешь, если я всерьез возьмусь за тебя, то размажу по стенке, как это уже не раз было. Уж в чем в чем, а в аэродинамике я в отличие от тебя, подкован. Скажи спасибо, что мне просто мараться об тебя брезгливо.Идиотик! Найди ХРЕСТОМАТИЙНУЮ картинку из "Динамики полёта"
[highlight]Чмошка ТРУСЛИВАЯ Абаканская...! [/highlight] ;D ;D ;D ;D
[highlight]Уже -"подтёр" свои Бредни об "Обратном" крене от отклонения телеги по курсу..!!! [/highlight] ;D ;D ;D ;D
"смелый", "умный", "грозный" Абаканский БОЛТУН (13,4@ДОБОЛ) - санчик...!!! ;D ;D ;D ;D ;D
Третье. Площадь боковой поверхности телеги я взял из таблицы Грига. Она тут где-то недалеко. Но это не принципиально. У нас ещё есть неизвестный параметр Су.
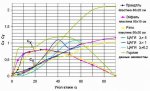
Здрасте!!! Вадим!!! Это - СРЕДНЕЕ из 7(СЕМИ!!!) реальных исследований по плоской пластине (упрощённая модель обтекателя!), начиная с дедушки Жуковского..!!!! 😡 😡 😡
Вот ссылка..! 😡 😡 😡
http://www.rosinmn.ru/vetro/plastina_velobok/plastina1.htm
[highlight]ТАБЛИЦА - ПО НИМ!!! [/highlight] 😡 😡 😡
Вложения


А ты не думал, что я тоже могу вешать народу лапшу на уши о трусливо подтертых тобой сообщениях? Возьми себя в руки ничего я не подтирал, ты это знаешь, и ведешь себя как подлая стервозная баба, отвратительная в своем бессилии :о)Уже -"подтёр" свои Бредни об "Обратном" крене от отклонения телеги по курсу..!!!
Григунчик, ты же знаешь, если я всерьез возьмусь за тебя, то размажу по стенке, как это уже не раз было. Уж в чем в чем, а в аэродинамике я в отличие от тебя, подкован. Скажи спасибо, что мне просто мараться об тебя брезгливо.Идиотик! Найди ХРЕСТОМАТИЙНУЮ картинку из "Динамики полёта"
А ты не думал, что я тоже могу вешать народу лапшу на уши о трусливо подтертых тобой сообщениях? Возьми себя в руки [highlight]ничего я не подтирал, ты это знаешь, и ведешь себя как подлая стервозная баба, отвратительная в своем бессилии [/highlight]:о)
[highlight]Чмошка ТРУСЛИВАЯ Абаканская...! [/highlight] ;D ;D ;D ;D
[highlight]Уже -"подтёр" свои СЕГОДНЯШНИЕ (не скопированные мной!) - БРЕДНИ об "Обратном" крене от отклонения телеги по курсу..!!! [/highlight] ;D ;D ;D ;D
Поверил я в твою - "принсёпиюльноздь"...! Не стал их КОПИРОВАТЬ для сохранения твоей ГЛУПОСТИ..!!! ;D ;D ;D
"смелый", "умный", "грозный" Абаканский БОЛТУН (13,4@ДОБОЛ) - санчик...!!! ;D ;D ;D ;D ;D
[highlight]Как Серёга - УДИВИТСЯ-ТО...!!!! Заодно и - Игл...!!! ;D ;D ;D
Они же из-за ТЕБЯ -"другана" тоже - ....ДОБОЛАМИ стали...!!! ;D ;D ;D
Они-то их (твои постики!) - ПОМНЯТ ...!!! ;D ;D ;D
А санчик - СПРЫГНУЛ УЖЕ с темы..!!! [/highlight] ;D ;D ;D ;D
[highlight]Ну-ка, чё-нить ЗАЯВИ про "ОБРАТНЫЙ" крен, типа - "смеленько-тихонечко" , ЧМО ТРУСЛИВОЕ Абаканское - санчик....!!! [/highlight] ;D ;D ;D ;D ;D
[highlight]Санчик! Как же Серёге и Иглу, теперь - БЫТЬ..?!!! [/highlight] ;D ;D ;D ;D
[highlight]Лучший "дружбан-теоретик" с "обратным креном" САНЧИК - ТРУСЛИВО ЗАТКНУЛСЯ и ЗАБЫЛ НАПРОЧЬ про "ОБРАТНЫЙ крен"...!!! [/highlight];D ;D ;D ;D ;D
[highlight]Еще, ДО - ПОЛЁТА и ДО - видеоролика Сергея..!!! Человек - спать лёг, а ты его, УЖЕ благополучно - ПРОДАЛ..!!! [/highlight] :IMHO
[highlight]Ты - ПОРАЗИТЕЛЬНЫЙ хлюздило, санчик..! [/highlight] :IMHO
[highlight]Лучший "дружбан-теоретик" с "обратным креном" САНЧИК - ТРУСЛИВО ЗАТКНУЛСЯ и ЗАБЫЛ НАПРОЧЬ про "ОБРАТНЫЙ крен"...!!! [/highlight];D ;D ;D ;D ;D
[highlight]Еще, ДО - ПОЛЁТА и ДО - видеоролика Сергея..!!! Человек - спать лёг, а ты его, УЖЕ благополучно - ПРОДАЛ..!!! [/highlight] :IMHO
[highlight]Ты - ПОРАЗИТЕЛЬНЫЙ хлюздило, санчик..! [/highlight] :IMHO
- Откуда
- г. Обнинск
Да...
Зашел посмотреть и ох#ел.
Этож надо было так все засрать.
Короче так.
Григ отдыхает неделю от писанины, избавляется от мании величия и учится общяться на форуме спокойно и уважительно к другим участникам, заодно читает ветку и думает как нам избавить ее от срача и оставить ценную инфу. Этим мы займемся через неделю, а пока я прикрою этот балаган.
И наверно стоит перестать в желтый все раскрашивать. Читать не возможно, в глазах рябит от желтизны.
Зашел посмотреть и ох#ел.
Этож надо было так все засрать.
Короче так.
Григ отдыхает неделю от писанины, избавляется от мании величия и учится общяться на форуме спокойно и уважительно к другим участникам, заодно читает ветку и думает как нам избавить ее от срача и оставить ценную инфу. Этим мы займемся через неделю, а пока я прикрою этот балаган.
И наверно стоит перестать в желтый все раскрашивать. Читать не возможно, в глазах рябит от желтизны.
Комментарий к опыту с вращающимся моторчиком от вентилятора на подвесе и его поведение (отклонение оси вращения на небольшой угол в горизонтальной плоскости) при перемещении вдоль оси вращения.
Сам опыт представлен в сообщении # 450 в ветке : http://www.reaa.ru/cgi-bin/yabb/YaBB.pl?num=1481889086/450
Основные тезисы:
- Отклонение оси моторчика вызвано гироскопическими силами ( момент внешней силы вызывает прецессию ).
- Момент внешней силы возникает по причине того, что моторчик закреплён не в кардановом подвесе, а за точку, расположенную не в Центре Масс и не лежащую на оси вращения ротора.
- Внешняя сила действует совместно с силой инерции, которая возникает в силу свойства инертности тела, обладающего массой. Они переменны по величине,- изменяются по гармоническому закону от нуля до максимального значения. Появляются в момент разгона ( ускорения ) и торможения ( замедления ).
«Жирным шрифтом» - выделены основные тезисы, которые раскрываются в тексте абзаца.
«Курсивом» - выделены дополнительные комментарии по тексту и замечания общего характера.
*( Тому, кто в достаточной степени «владеет вопросом» и не желает тратить время на чтение подробностей рассмотрения опыта, рекомендую сразу перейти к ВЫВОДАМ, сделанным в конце. Там же можно сразу оценить глубину заблуждения автора и выразить своё мнение касательно сути изложения.
После всех редактирований, исправлений и дополнений, понимая ограниченность и упрощённость описания явления, всё более испытывая желание не представлять вниманию читателя этот материал, в конце – концов, решил оставить. Пусть он послужит наглядным примером того, каким иногда витиеватым путём следует мысль, через заблуждения, сомнения и радостные находки той самой,- лаконичной и ёмкой формы выражения идеи, которую автор попытается донести до читателя. )
Сам опыт представлен в сообщении # 450 в ветке : http://www.reaa.ru/cgi-bin/yabb/YaBB.pl?num=1481889086/450
Основные тезисы:
- Отклонение оси моторчика вызвано гироскопическими силами ( момент внешней силы вызывает прецессию ).
- Момент внешней силы возникает по причине того, что моторчик закреплён не в кардановом подвесе, а за точку, расположенную не в Центре Масс и не лежащую на оси вращения ротора.
- Внешняя сила действует совместно с силой инерции, которая возникает в силу свойства инертности тела, обладающего массой. Они переменны по величине,- изменяются по гармоническому закону от нуля до максимального значения. Появляются в момент разгона ( ускорения ) и торможения ( замедления ).
«Жирным шрифтом» - выделены основные тезисы, которые раскрываются в тексте абзаца.
«Курсивом» - выделены дополнительные комментарии по тексту и замечания общего характера.
*( Тому, кто в достаточной степени «владеет вопросом» и не желает тратить время на чтение подробностей рассмотрения опыта, рекомендую сразу перейти к ВЫВОДАМ, сделанным в конце. Там же можно сразу оценить глубину заблуждения автора и выразить своё мнение касательно сути изложения.
После всех редактирований, исправлений и дополнений, понимая ограниченность и упрощённость описания явления, всё более испытывая желание не представлять вниманию читателя этот материал, в конце – концов, решил оставить. Пусть он послужит наглядным примером того, каким иногда витиеватым путём следует мысль, через заблуждения, сомнения и радостные находки той самой,- лаконичной и ёмкой формы выражения идеи, которую автор попытается донести до читателя. )
Поскольку, при приложении внешних сил и вызванном ими движении, поведение быстро вращающихся тел ( гироскопов ) и не вращяющихся тел существенно отличается, то уместно разделить наш опыт на простые составляющие и рассмотреть их по-отдельности. Рассмотрим поведение маятника как не вращающегося тела. Рассмотрим поведение гироскопа в тех же условиях. Затем, объединим оба случая, с учётом взаимовлияния, в надежде получить логичную результирующую картину.
Рассматривая моторчик, как обладающий массой маятник на длинном подвесе, отмечу следующие моменты:
- на него действуют сила притяжения Земли и сила инерции;
- воздействия, возникающие в рассматриваемом опыте и длительность всего цикла имеют непродолжительный характер и они не вызывают принципиального качественного изменения свойств системы;
- рассматриваемая система и её поведение является упрощённой моделью, достаточной для получения первоначального представления о процессах в ней и описания полученного результата;
- наш подвес состоит из двух звеньев,- длинной гибкой «подвески» ( L – «ЭЛЬ» заглавное ) и короткого жёсткого «плеча» ( r – «эр» прописное ), которым является корпус моторчика;
- точка соединения «подвески» и «плеча» является шарниром со свободой вращения по трём осям.
Рассматривая моторчик, как обладающий массой маятник на длинном подвесе, отмечу следующие моменты:
- на него действуют сила притяжения Земли и сила инерции;
- воздействия, возникающие в рассматриваемом опыте и длительность всего цикла имеют непродолжительный характер и они не вызывают принципиального качественного изменения свойств системы;
- рассматриваемая система и её поведение является упрощённой моделью, достаточной для получения первоначального представления о процессах в ней и описания полученного результата;
- наш подвес состоит из двух звеньев,- длинной гибкой «подвески» ( L – «ЭЛЬ» заглавное ) и короткого жёсткого «плеча» ( r – «эр» прописное ), которым является корпус моторчика;
- точка соединения «подвески» и «плеча» является шарниром со свободой вращения по трём осям.
Вложения
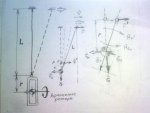
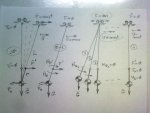
И так, [highlight]на картинках представлены:[/highlight]
- Корпус моторчика на «подвеске» ( L ) с ротором внутри. «Плечо» ( r ) – расстояние от оси вращения ротора и, расположенного на оси, Центра Масс (ЦМ) моторчика до точки крепления «подвески» на корпусе моторчика. Направление движения и изменение положения «подвески» ( пунктиром ) при переходе маятника из неподвижного состояния в состояние равномерного поступательного движения*. Направление вращения ротора - по часовой стрелке ( т.е. правое,- если смотреть изнутри моторчика по оси наружу ).
*( Это будет отрезок времени, когда рука экспериментатора, удерживающая маятник, разгоняется от нулевой до скорости равномерного перемещения. Этап ускорения.)
- Основные силы, действующие на маятник ( ЦМ ) при отклонении подвеса. Вес тела ( G – «ЖЭ» заглавное). Внешняя сила ( F –«ЭФ» заглавное ) и её проекция в шарнир ( F’ –«ЭФ штрих» заглавное ). Сила инерции ( FИ - «ЭФ И» заглавное ).
- Основные моменты, возникающие в системе. Момент внешней силы относительно ЦМ, ( MF’ – «ЭМ эф штрих» ) действующий на «плече» ( r ). Момент от составляющей* силы тяжести ( веса ), ( MGx – «ЭМ ЖЭ икс» ) действующий на плече, равном расстоянию от ЦМ до верхней точки крепления подвеса.
*( В таком выражении (формулировке) момент силы тяжести наиболее близко отражает физику процесса. Берётся проекция веса ( Gх ) на перпендикуляр к линии, соединяющей ЦМ и точку подвеса маятника. Далее, для удобства написания, этот момент обозначим просто MG ).
[highlight]Реактивный момент[/highlight], в данном случае, рассмотрению не подлежит, по причине его крайне незначительной величины. Он ощутимо действует только на этапе раскрутки ротора моторчика. При установившихся оборотах ротора его величина равна потерям на трение в опорах ( подшипниках ротора ) и коллекторе.
- Корпус моторчика на «подвеске» ( L ) с ротором внутри. «Плечо» ( r ) – расстояние от оси вращения ротора и, расположенного на оси, Центра Масс (ЦМ) моторчика до точки крепления «подвески» на корпусе моторчика. Направление движения и изменение положения «подвески» ( пунктиром ) при переходе маятника из неподвижного состояния в состояние равномерного поступательного движения*. Направление вращения ротора - по часовой стрелке ( т.е. правое,- если смотреть изнутри моторчика по оси наружу ).
*( Это будет отрезок времени, когда рука экспериментатора, удерживающая маятник, разгоняется от нулевой до скорости равномерного перемещения. Этап ускорения.)
- Основные силы, действующие на маятник ( ЦМ ) при отклонении подвеса. Вес тела ( G – «ЖЭ» заглавное). Внешняя сила ( F –«ЭФ» заглавное ) и её проекция в шарнир ( F’ –«ЭФ штрих» заглавное ). Сила инерции ( FИ - «ЭФ И» заглавное ).
- Основные моменты, возникающие в системе. Момент внешней силы относительно ЦМ, ( MF’ – «ЭМ эф штрих» ) действующий на «плече» ( r ). Момент от составляющей* силы тяжести ( веса ), ( MGx – «ЭМ ЖЭ икс» ) действующий на плече, равном расстоянию от ЦМ до верхней точки крепления подвеса.
*( В таком выражении (формулировке) момент силы тяжести наиболее близко отражает физику процесса. Берётся проекция веса ( Gх ) на перпендикуляр к линии, соединяющей ЦМ и точку подвеса маятника. Далее, для удобства написания, этот момент обозначим просто MG ).
[highlight]Реактивный момент[/highlight], в данном случае, рассмотрению не подлежит, по причине его крайне незначительной величины. Он ощутимо действует только на этапе раскрутки ротора моторчика. При установившихся оборотах ротора его величина равна потерям на трение в опорах ( подшипниках ротора ) и коллекторе.
Вложения
( Рисунок выше )
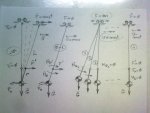
Сначала рассмотрим движение маятника, как не вращающееся тело у которого вся масса сосредоточена в ЦМ. и обладающего незначительным моментом инерции ( не путайте с инертностью ). Так же, в дальнейшем, допустим ещё ряд упрощений, принципиально не влияющих на результат рассмотрения.
[highlight]поз.0 [/highlight]: - В начальный момент движения, к маятнику ( рукой экспериментатора ) прикладывается сила ( F ) вызывающая ускорение верхней точки подвески от нулевой, до некоторой скорости ( v – «вэ» прописное ). Инертность маятника ( "свойство тел оставаться в покое или двигаться поступательно без ускорения…") вызывает его отставание от уже начавшей двигаться и сместившейся ( верхней ) точки подвеса. В результате совместного действия силы инерции ( FИ ) и проекции внешней силы ( F’ ), появляется момент ( MF’ ), который вызывает поворот ЦМ на радиусе полной длины подвеса ( L + r ), или отклонение моторчика от вертикали относительно точки крепления подвеса. Скажу так: - этот момент «следит» за тем, чтобы «плечо» ( r ) и «подвеска» ( L ) располагались в одну линию* . Одновременно, с отклонением подвеса от вертикали, под действием силы тяжести возникает маятниковый момент ( MG ), который стремится вернуть маятник в вертикальное положение.
*( Собственно, чтобы подчеркнуть эту связь через шарнир жёсткого «плеча» и гибкой «подвески», я и перенёс внешнюю силу в шарнир и обозначил её проекцию ( F’ ). Эта связка понадобится для дальнейшего рассмотрения поведения маятника, как гироскопа ).
Сначала рассмотрим движение маятника, как не вращающееся тело у которого вся масса сосредоточена в ЦМ. и обладающего незначительным моментом инерции ( не путайте с инертностью ). Так же, в дальнейшем, допустим ещё ряд упрощений, принципиально не влияющих на результат рассмотрения.
[highlight]поз.0 [/highlight]: - В начальный момент движения, к маятнику ( рукой экспериментатора ) прикладывается сила ( F ) вызывающая ускорение верхней точки подвески от нулевой, до некоторой скорости ( v – «вэ» прописное ). Инертность маятника ( "свойство тел оставаться в покое или двигаться поступательно без ускорения…") вызывает его отставание от уже начавшей двигаться и сместившейся ( верхней ) точки подвеса. В результате совместного действия силы инерции ( FИ ) и проекции внешней силы ( F’ ), появляется момент ( MF’ ), который вызывает поворот ЦМ на радиусе полной длины подвеса ( L + r ), или отклонение моторчика от вертикали относительно точки крепления подвеса. Скажу так: - этот момент «следит» за тем, чтобы «плечо» ( r ) и «подвеска» ( L ) располагались в одну линию* . Одновременно, с отклонением подвеса от вертикали, под действием силы тяжести возникает маятниковый момент ( MG ), который стремится вернуть маятник в вертикальное положение.
*( Собственно, чтобы подчеркнуть эту связь через шарнир жёсткого «плеча» и гибкой «подвески», я и перенёс внешнюю силу в шарнир и обозначил её проекцию ( F’ ). Эта связка понадобится для дальнейшего рассмотрения поведения маятника, как гироскопа ).
Вложения
[highlight]поз. 0 – 1[/highlight] : - На этом отрезке времени, угол отклонения подвеса, маятниковый момент ( MG ), скорость движения ( v ) и проекция в шарнир внешней силы ( F’ ) достигают максимальных значений. Под совместным действием маятникового момента и внешней силы происходит ускорение ЦМ. В конце этого временного отрезка внешняя сила прекращает своё действие и дальнейшее движение верхней точки подвеса ( руки экспериментатора ) происходит по инерции,- равномерно поступательно ( с постоянной скоростью и прямолинейно ). При этом максимальна величина силы инерции ( FИ ) приложенной в ЦМ.
[highlight]поз. 1 – 3 [/highlight]: - На этом отрезке времени три позиции системы совмещены в одну точку подвеса (верхнюю). При постоянной скорости верхней точки подвеса ( v = const ), после прекращения действия внешней силы ( F = 0 ) и, соответственно, её проекции ( F’ = 0 ), действие маятникового момента ( MG ) продолжает придавать ускорение ( разгонять ) ЦМ. Ускорившись, ЦМ приобретает скорость большую, чем скорость движения подвеса ( v ). Иначе, моторчик никогда бы не «догнал» верхнюю точку крепления подвеса. В какой-то момент, ЦМ принимает вертикальное положение и, двигаясь по инерции дальше, прокачивается вперёд по направлению движения руки экспериментатора. Далее, устанавливается колебательный процесс, который описывает поведение маятника. С тем лишь отличием, что этот маятник не неподвижен, а равномерно движется в заданном изначально направлении со скоростью ( v ).
В отсутствие сил трения в подвесе и сопротивления воздуха ( потери энергии системой ), эти колебания могут продолжаться сколь угодно долго!
Однако, для упрощения описания движения системы, я не рассматриваю вертикальные перемещения ЦМ, в результате которых происходит обмен потенциальной и кинетической энергии. Так же, не принимаю к рассмотрению колебательный характер этого этапа движения.
Отмечу один [highlight]ВАЖНЫЙ[/highlight] момент. В результате незначительных неосознанных перемещений руки экспериментатора по вертикали или горизонтали, на этапе 1 – 3, происходит торможение ( замедление движения ЦМ ) что вызывает быстрое затухание колебаний в системе. Можно и сознательно ввести эти корректировки, в нужные моменты, прикладывая внешнюю силу ( F = var ) и изменяя скорость движения ( v [ch8800] const ). Однако, наиболее эффективно и незаметно это происходит при сохранении скорости ( v = const ) и отсутствии горизонтально прилагаемой внешней силы ( F’ = 0 ), вертикальными перемещениями руки.
Поскольку ЦМ «догоняет» верхнюю точку подвеса[/u , уменьшается угол отклонения маятника и, соответственно, величина маятникового момента ( MG ) изменяется от его максимального значения в т.1, до нулевого значения в т.3. В отсутствие сил действующих по горизонтали, устанавливается равновесие системы*. Вертикальные силы «веса» и его реакция в подвесе взаимно компенсируют друг друга.
*( Если верхнюю точку подвеса представить в виде невесомой ( безынерционной ) тележки или ролика, который может свободно катиться по направляющей опоре ( «рельсу» ), то в отсутствие внешней силы ( F ), она будет перемещаться с переменной скоростью ( v = var ), противоположно следуя за ускорением ЦМ. Таким образом, уменьшая плечо силы тяжести и внося вклад в «демпфирование» - быстрое затухание колебаний маятника.)
[highlight]поз. 1 – 3 [/highlight]: - На этом отрезке времени три позиции системы совмещены в одну точку подвеса (верхнюю). При постоянной скорости верхней точки подвеса ( v = const ), после прекращения действия внешней силы ( F = 0 ) и, соответственно, её проекции ( F’ = 0 ), действие маятникового момента ( MG ) продолжает придавать ускорение ( разгонять ) ЦМ. Ускорившись, ЦМ приобретает скорость большую, чем скорость движения подвеса ( v ). Иначе, моторчик никогда бы не «догнал» верхнюю точку крепления подвеса. В какой-то момент, ЦМ принимает вертикальное положение и, двигаясь по инерции дальше, прокачивается вперёд по направлению движения руки экспериментатора. Далее, устанавливается колебательный процесс, который описывает поведение маятника. С тем лишь отличием, что этот маятник не неподвижен, а равномерно движется в заданном изначально направлении со скоростью ( v ).
В отсутствие сил трения в подвесе и сопротивления воздуха ( потери энергии системой ), эти колебания могут продолжаться сколь угодно долго!
Однако, для упрощения описания движения системы, я не рассматриваю вертикальные перемещения ЦМ, в результате которых происходит обмен потенциальной и кинетической энергии. Так же, не принимаю к рассмотрению колебательный характер этого этапа движения.
Отмечу один [highlight]ВАЖНЫЙ[/highlight] момент. В результате незначительных неосознанных перемещений руки экспериментатора по вертикали или горизонтали, на этапе 1 – 3, происходит торможение ( замедление движения ЦМ ) что вызывает быстрое затухание колебаний в системе. Можно и сознательно ввести эти корректировки, в нужные моменты, прикладывая внешнюю силу ( F = var ) и изменяя скорость движения ( v [ch8800] const ). Однако, наиболее эффективно и незаметно это происходит при сохранении скорости ( v = const ) и отсутствии горизонтально прилагаемой внешней силы ( F’ = 0 ), вертикальными перемещениями руки.
Поскольку ЦМ «догоняет» верхнюю точку подвеса[/u , уменьшается угол отклонения маятника и, соответственно, величина маятникового момента ( MG ) изменяется от его максимального значения в т.1, до нулевого значения в т.3. В отсутствие сил действующих по горизонтали, устанавливается равновесие системы*. Вертикальные силы «веса» и его реакция в подвесе взаимно компенсируют друг друга.
*( Если верхнюю точку подвеса представить в виде невесомой ( безынерционной ) тележки или ролика, который может свободно катиться по направляющей опоре ( «рельсу» ), то в отсутствие внешней силы ( F ), она будет перемещаться с переменной скоростью ( v = var ), противоположно следуя за ускорением ЦМ. Таким образом, уменьшая плечо силы тяжести и внося вклад в «демпфирование» - быстрое затухание колебаний маятника.)
Вложения
[highlight]поз. 4 :[/highlight] - Далее, никакие внешние силы и моменты е системе не прикладываются, а внутренние взаимно скомпенсированы. Система находится в равновесии. Скорости подвеса и ЦМ равны и постоянны ( v=const ), движение всей системы происходит по инерции - равномерно и прямолинейно.
Иными словами, маятник висит вертикально ( по направлению действия силы тяжести ) и движется с постоянной скоростью.
При замедлении системы до ( v=0 ) все силы и моменты будут поэтапно возникать в обратной последовательности, а их действие будет противоположно направлено. На этом этапе верхняя точка подвеса, под действием внешней силы ( - F ) будет сначала «отставать» от ЦМ, а затем, по прекращении её действия, - «догонять» ЦМ под действием силы тяжести.
Иными словами, маятник висит вертикально ( по направлению действия силы тяжести ) и движется с постоянной скоростью.
При замедлении системы до ( v=0 ) все силы и моменты будут поэтапно возникать в обратной последовательности, а их действие будет противоположно направлено. На этом этапе верхняя точка подвеса, под действием внешней силы ( - F ) будет сначала «отставать» от ЦМ, а затем, по прекращении её действия, - «догонять» ЦМ под действием силы тяжести.
Вложения

( Рисунок выше )
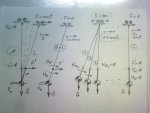
Теперь, аналогично, рассмотрим движение закреплённого в маятниковом подвесе моторчика, имеющего быстро вращающийся ротор, . Напомню, что подвес состоит из двух звеньев,- длинной гибкой «подвески» ( L ) и короткого жёсткого «плеча» ( r ), которым является корпус моторчика. Направление вращения ротора - по часовой стрелке ( т.е. правое,- если смотреть изнутри моторчика по оси наружу). Ротор вращается с угловой скоростью ( [ch969]р – «омега- эр» строчное ). Точка соединения «подвески» и корпуса моторчика - «плеча» является шарниром со свободой вращения по трём осям.
[highlight] поз. 0[/highlight] : - Аналогично рассмотрению в предыдущем примере, в начальный момент движения, к верхней точке подвеса маятника-гироскопа ( рукой экспериментатора ) прикладывается сила ( F ) вызывающая её ускорение от нулевой, до некоторой скорости ( v ). Скорость установившегося движения небольшая, но инертность маятника вызывает его отставание от уже начавшей двигаться и сместившейся ( верхней ) точки подвеса. В результате совместного действия силы инерции ( FИ ) и проекции внешней силы ( F’ ), появляется момент ( MF’ ), который воздействует на ротор, стремясь вызвать его поворот относительно ЦМ на оси, перпендикулярной плоскости листа с картинкой.
Вот тут, начинается самое интересное… [highlight]Первое основное свойство гироскопов[/highlight],- “сохранять неизменным в пространстве положение оси вращения…”- это, так сказать, инерция быстро вращающихся тел. Поэтому, не смотря на «отставание» ЦМ от верхней точки подвеса, отклоняется от вертикали только «подвеска» ( L ). «Плечо» ( r) ( которым является корпус моторчика ) через подшипниковые опоры жёстко связан с осью вращения, и его положение относительно вертикали так же остаётся без изменения
Одновременно, с отклонением «подвески» от вертикали, под действием силы тяжести возникает маятниковый момент ( MG’ – «ЭМ ЖЭ штрих» ), который стремится вернуть маятник в вертикальное положение. Если принять, что основная масса моторчика сосредоточена в роторе, то, в отличие от простого маятника, рассмотренного в первом случае, плечом для маятникового момента будет расстояние от ЦМ до верхней точки крепления подвеса, несколько отличное от полной длины подвеса ( L + r ).
Теперь, аналогично, рассмотрим движение закреплённого в маятниковом подвесе моторчика, имеющего быстро вращающийся ротор, . Напомню, что подвес состоит из двух звеньев,- длинной гибкой «подвески» ( L ) и короткого жёсткого «плеча» ( r ), которым является корпус моторчика. Направление вращения ротора - по часовой стрелке ( т.е. правое,- если смотреть изнутри моторчика по оси наружу). Ротор вращается с угловой скоростью ( [ch969]р – «омега- эр» строчное ). Точка соединения «подвески» и корпуса моторчика - «плеча» является шарниром со свободой вращения по трём осям.
[highlight] поз. 0[/highlight] : - Аналогично рассмотрению в предыдущем примере, в начальный момент движения, к верхней точке подвеса маятника-гироскопа ( рукой экспериментатора ) прикладывается сила ( F ) вызывающая её ускорение от нулевой, до некоторой скорости ( v ). Скорость установившегося движения небольшая, но инертность маятника вызывает его отставание от уже начавшей двигаться и сместившейся ( верхней ) точки подвеса. В результате совместного действия силы инерции ( FИ ) и проекции внешней силы ( F’ ), появляется момент ( MF’ ), который воздействует на ротор, стремясь вызвать его поворот относительно ЦМ на оси, перпендикулярной плоскости листа с картинкой.
Вот тут, начинается самое интересное… [highlight]Первое основное свойство гироскопов[/highlight],- “сохранять неизменным в пространстве положение оси вращения…”- это, так сказать, инерция быстро вращающихся тел. Поэтому, не смотря на «отставание» ЦМ от верхней точки подвеса, отклоняется от вертикали только «подвеска» ( L ). «Плечо» ( r) ( которым является корпус моторчика ) через подшипниковые опоры жёстко связан с осью вращения, и его положение относительно вертикали так же остаётся без изменения
Одновременно, с отклонением «подвески» от вертикали, под действием силы тяжести возникает маятниковый момент ( MG’ – «ЭМ ЖЭ штрих» ), который стремится вернуть маятник в вертикальное положение. Если принять, что основная масса моторчика сосредоточена в роторе, то, в отличие от простого маятника, рассмотренного в первом случае, плечом для маятникового момента будет расстояние от ЦМ до верхней точки крепления подвеса, несколько отличное от полной длины подвеса ( L + r ).
Вложения

[highlight]поз. 0 – 1[/highlight] : - На этом отрезке времени, угол отклонения подвеса, маятниковый момент ( MG’ ), скорость движения ( v ) и проекция в шарнир внешней силы ( F’ ) достигают максимальных значений. Под совместным действием маятникового момента и внешней силы происходит ускорение ЦМ. Сила инерции ЦМ достигает максимального значения.
Действие маятникового момента ( MG ) будет отличаться от моторчика с не вращающимся ротором, поэтому я обозначил его ( MG’ ). Часть момента силы тяжести, которая «заставляет» подвес выпрямиться, будет стремиться наклонить «плечо» ( r ) в сторону движения подвеса. Действие этой составляющей будет аналогично действию проекции внешней силы ( F’ ). Результат совместного действия моментов от двух сил я обозначу как «момент сил в шарнире» ( MШ - «ЭМ ША» заглавное ).
[highlight]Вторым основным свойством гироскопов[/highlight] является без инерционность гироскопических сил ( и создающих их моментов ). Т.е., гироскопические силы мгновенно возникают, как реакция на внешнее воздействие и так же мгновенно исчезают при прекращении внешнего воздействия на ротор. Потому, как только возникает момент от внешней силы ( MF’ ), стремящийся повернуть корпус моторчика с ротором вдоль направления движения маятника, мгновенно возникает «прецессия» или «гироскопический момент» ( MГ – «ЭМ ГЭ» заглавное ). Гироскопический момент вызывает поворот оси ротора ( и связанного с ним корпуса моторчика ) в горизонтальной плоскости,- в данном случае, влево по направлению движения руки экспериментатора.
Согласно правилам: «правого винта» и «правой тройки векторов», могу утверждать, что выходной конец вала моторчика вращается по часовой стрелке (вправо), если смотреть вдоль него изнутри моторчика. Т.е. так же, как на картинках, прилагаемых к теоретическому рассмотрению опыта. ( на видео комментируемого опыта этого не видно )
В конце этого временного отрезка внешняя сила ( F ) прекращает своё действие. Дальнейшее движение верхней точки подвеса ( руки экспериментатора ) происходит по инерции,- равномерно поступательно ( с постоянной скоростью и прямолинейно ). Одновременно, достигнув максимального значения, начинает уменьшаться величина силы инерции ( FИ ). Однако, действие «момента сил в шарнире» ( MШ ) обеспечивается составляющей силы тяжести, следовательно, в этот момент прецессия не прекращается. Ось вращения ротора моторчика продолжает отклонение влево от направления движения, без изменения вертикали.
Действие маятникового момента ( MG ) будет отличаться от моторчика с не вращающимся ротором, поэтому я обозначил его ( MG’ ). Часть момента силы тяжести, которая «заставляет» подвес выпрямиться, будет стремиться наклонить «плечо» ( r ) в сторону движения подвеса. Действие этой составляющей будет аналогично действию проекции внешней силы ( F’ ). Результат совместного действия моментов от двух сил я обозначу как «момент сил в шарнире» ( MШ - «ЭМ ША» заглавное ).
[highlight]Вторым основным свойством гироскопов[/highlight] является без инерционность гироскопических сил ( и создающих их моментов ). Т.е., гироскопические силы мгновенно возникают, как реакция на внешнее воздействие и так же мгновенно исчезают при прекращении внешнего воздействия на ротор. Потому, как только возникает момент от внешней силы ( MF’ ), стремящийся повернуть корпус моторчика с ротором вдоль направления движения маятника, мгновенно возникает «прецессия» или «гироскопический момент» ( MГ – «ЭМ ГЭ» заглавное ). Гироскопический момент вызывает поворот оси ротора ( и связанного с ним корпуса моторчика ) в горизонтальной плоскости,- в данном случае, влево по направлению движения руки экспериментатора.
Согласно правилам: «правого винта» и «правой тройки векторов», могу утверждать, что выходной конец вала моторчика вращается по часовой стрелке (вправо), если смотреть вдоль него изнутри моторчика. Т.е. так же, как на картинках, прилагаемых к теоретическому рассмотрению опыта. ( на видео комментируемого опыта этого не видно )
В конце этого временного отрезка внешняя сила ( F ) прекращает своё действие. Дальнейшее движение верхней точки подвеса ( руки экспериментатора ) происходит по инерции,- равномерно поступательно ( с постоянной скоростью и прямолинейно ). Одновременно, достигнув максимального значения, начинает уменьшаться величина силы инерции ( FИ ). Однако, действие «момента сил в шарнире» ( MШ ) обеспечивается составляющей силы тяжести, следовательно, в этот момент прецессия не прекращается. Ось вращения ротора моторчика продолжает отклонение влево от направления движения, без изменения вертикали.
Вложения

[highlight]поз. 1 – 3[/highlight] : - Как и в случае маятника, который рассматривался выше, на этом отрезке времени три позиции системы совмещены в одну точку подвеса (верхнюю). При постоянной скорости верхней точки подвеса ( v = const ), после прекращения действия внешней силы ( F = 0 ) и, соответственно, её проекции ( F’ = 0 ), только действие веса маятника - маятникового момента ( MG’ ), придаёт ускорение ( разгоняет ) ЦМ в направлении движения подвеса. Одновременно, действие маятникового момента в шарнире ( или «момента сил в шарнире» ( MШ ) ) можно рассматривать как силу, создающую момент относительно центральных осей инерции ротора. Это приводит к сохранению прецессии и дальнейшему повороту оси ротора влево. Иными словами, пока, под действием горизонтальной проекции силы тяжести ( GХ ) в «шарнире» существует ускорение, гироскоп будет прецессировать. Ось ротора поворачивается, достигая максимального отклонения на угол ( @ - «альфа» ) в поз.3.
[highlight]ВАЖНО[/highlight] отметить физику процесса движения маятника, как несимметричного гироскопа. В общем случае, пока на несимметричный гироскоп воздействует внешняя сила ( любой природы,- аэродинамическая, инерциальная, механическая ) он будет прецессировать. При этом, сколь-нибудь заметного поворота по направлению действия внешней силы не происходит!**.
**( Это так, если внешняя сила направлена не в плоскости вращения ротора, а под существенным углом к ней. )
Корпус нашего моторчика жёстко связан с ротором и прикладываемая к нему внешняя сила имеет плечо относительно центра инерции ротора. Когда ускорение направлено по движению,- «разгон» - ротор нашего моторчика поворачивается влево. Когда ускорение против движения,- «торможение» - ротор поворачивается вправо.
В момент поз.3 , маятник принимает вертикальное положение. Затем, двигаясь по инерции, он прокачивается вперёд по направлению движения руки экспериментатора. Далее, устанавливается колебательный процесс, который описывает поведение маятника, движущегося равномерно в заданном изначально направлении со скоростью ( v ). Дополнительным отличием будет изменяющийся угол между «подвеской» ( L ) и «плечом» ( r ). При смене направления действия маятникового момента ( MG’ ) и ускорения, будет изменяться и направление прецессии. Моторчик будет совершать вместе с маятником продольные колебания и, дополнительно, его ось будет колебаться в горизонтальной плоскости.
Как было отмечено в первом рассмотрении, в результате незначительных неосознанных перемещений руки экспериментатора по вертикали или горизонтали и изменения величины и направления действия внешней силы ( F ), на этапе 1 – 3, происходит торможение ( замедление движения ЦМ ) и «демпфирование». Это вызывает быстрое затухание колебаний в системе. Поскольку величина маятникового момента ( MG’ ) изменяется от его максимального значения в т.1, до нулевого значения в т.3, в вертикальном положении маятника устанавливается равновесие системы. Ось ротора, совершив несколько «подёргиваний» в горизонтальной плоскости устанавливается под углом ( @ - «альфа» ).
[highlight]ВАЖНО[/highlight] отметить физику процесса движения маятника, как несимметричного гироскопа. В общем случае, пока на несимметричный гироскоп воздействует внешняя сила ( любой природы,- аэродинамическая, инерциальная, механическая ) он будет прецессировать. При этом, сколь-нибудь заметного поворота по направлению действия внешней силы не происходит!**.
**( Это так, если внешняя сила направлена не в плоскости вращения ротора, а под существенным углом к ней. )
Корпус нашего моторчика жёстко связан с ротором и прикладываемая к нему внешняя сила имеет плечо относительно центра инерции ротора. Когда ускорение направлено по движению,- «разгон» - ротор нашего моторчика поворачивается влево. Когда ускорение против движения,- «торможение» - ротор поворачивается вправо.
В момент поз.3 , маятник принимает вертикальное положение. Затем, двигаясь по инерции, он прокачивается вперёд по направлению движения руки экспериментатора. Далее, устанавливается колебательный процесс, который описывает поведение маятника, движущегося равномерно в заданном изначально направлении со скоростью ( v ). Дополнительным отличием будет изменяющийся угол между «подвеской» ( L ) и «плечом» ( r ). При смене направления действия маятникового момента ( MG’ ) и ускорения, будет изменяться и направление прецессии. Моторчик будет совершать вместе с маятником продольные колебания и, дополнительно, его ось будет колебаться в горизонтальной плоскости.
Как было отмечено в первом рассмотрении, в результате незначительных неосознанных перемещений руки экспериментатора по вертикали или горизонтали и изменения величины и направления действия внешней силы ( F ), на этапе 1 – 3, происходит торможение ( замедление движения ЦМ ) и «демпфирование». Это вызывает быстрое затухание колебаний в системе. Поскольку величина маятникового момента ( MG’ ) изменяется от его максимального значения в т.1, до нулевого значения в т.3, в вертикальном положении маятника устанавливается равновесие системы. Ось ротора, совершив несколько «подёргиваний» в горизонтальной плоскости устанавливается под углом ( @ - «альфа» ).
Вложения

[highlight]поз. 4[/highlight] : - Далее, никакие внешние силы и моменты к системе не прикладываются, а внутренние взаимно скомпенсированы. Система находится в равновесии. Скорости подвеса и ЦМ равны и постоянны ( v=const ), движение всей системы происходит по инерции - равномерно и прямолинейно. Угол отклонения оси ротора ( @ ) от направления перемещения маятника не изменяется,- прецессии нет ( MГ = 0 ).
Иными словами, маятник - гироскоп висит вертикально ( по направлению действия силы тяжести ) и движется с постоянной скоростью.
При замедлении системы до остановки ( v=0 ) все силы и моменты будут поэтапно возникать в обратной последовательности, а их действие будет противоположно направлено. На этом этапе верхняя точка подвеса, под действием внешней силы ( - F ) будет сначала «отставать» от ЦМ, а затем, по прекращении её действия, - «догонять» ЦМ под действием силы тяжести. Ось ротора повернётся обратно на угол ( - @ ) и в точке остановки займёт положение вдоль направления движения.
[highlight]ВЫВОДЫ : [/highlight]
1. Прецессия несимметричного ( «тяжёлого» ) гироскопа может быть вызвана не только внешней силой, имеющей механическую природу ( сила тяги пропеллера, давление потока воздуха ), но и инерциальными силами, которые пропорциональны массе тела и ускорению ( сила инерции, сила тяжести ).
2. Чем больше «плечо», на котором действует внешняя сила, тем меньше её величина требуется, чтобы создать одинаковый гироскопический момент ( угол отклонения ротора, величину угловой скорости прецессии )
3. В «жёстко» связанной гироскопической системе корпус – ротор ( не являющейся кардановым подвесом ) действия сил и моментов передаётся как в прямом, так и в обратном направлении. От корпуса – на ротор и от ротора – на корпус, вызывая изменение углового положения в пространстве ( поворот ).
4. Пространственное изменение углового положения ( поворот ) оси ротора несимметричного гироскопа, обыкновенно, не сопровождается изменением углового положения в пространстве «плеча» приложения внешней силы в плоскости действия момента этой силы.
5. Гироскоп ведёт себя аналогично угловому редуктору,- «передаёт» момент в направлении, ортогональном ( перпендикулярном ) «входящему» моменту.
Как видите, «очень много букав» потребовалось, чтобы коротко и просто (с упрощениями) описать такой незатейливый опыт с моторчиком в подвесе.
С тем же моторчиком и разными подвесами и упорами можно провести ещё ряд опытов…
Это весьма познавательное занятие, которое ведёт к более чёткому пониманию процессов, происходящих на борту летательного аппарата с винтомоторной установкой (и балансирным управлением).
Потому, прошу бережно относиться к печатным символам в Ваших сообщениях по этой теме…
Ниже представлены две ссылки на подборки материала по рассматриваемому вопросу:
http://www.teoretmeh.ru/dinamika9.htm
(Краткая компеляция из «Механики» С.П.Стрелкова и «Теории гироскопов» К.Магнуса, правда, с небольшими ошибками, но с некоторыми интересными дополнениями примеров из других источников.)
http://teormech.ru/index.php/lections/lection/3
(Правила переноса сил. Из учебника «Теоретическая механика» …)
Иными словами, маятник - гироскоп висит вертикально ( по направлению действия силы тяжести ) и движется с постоянной скоростью.
При замедлении системы до остановки ( v=0 ) все силы и моменты будут поэтапно возникать в обратной последовательности, а их действие будет противоположно направлено. На этом этапе верхняя точка подвеса, под действием внешней силы ( - F ) будет сначала «отставать» от ЦМ, а затем, по прекращении её действия, - «догонять» ЦМ под действием силы тяжести. Ось ротора повернётся обратно на угол ( - @ ) и в точке остановки займёт положение вдоль направления движения.
[highlight]ВЫВОДЫ : [/highlight]
1. Прецессия несимметричного ( «тяжёлого» ) гироскопа может быть вызвана не только внешней силой, имеющей механическую природу ( сила тяги пропеллера, давление потока воздуха ), но и инерциальными силами, которые пропорциональны массе тела и ускорению ( сила инерции, сила тяжести ).
2. Чем больше «плечо», на котором действует внешняя сила, тем меньше её величина требуется, чтобы создать одинаковый гироскопический момент ( угол отклонения ротора, величину угловой скорости прецессии )
3. В «жёстко» связанной гироскопической системе корпус – ротор ( не являющейся кардановым подвесом ) действия сил и моментов передаётся как в прямом, так и в обратном направлении. От корпуса – на ротор и от ротора – на корпус, вызывая изменение углового положения в пространстве ( поворот ).
4. Пространственное изменение углового положения ( поворот ) оси ротора несимметричного гироскопа, обыкновенно, не сопровождается изменением углового положения в пространстве «плеча» приложения внешней силы в плоскости действия момента этой силы.
5. Гироскоп ведёт себя аналогично угловому редуктору,- «передаёт» момент в направлении, ортогональном ( перпендикулярном ) «входящему» моменту.
Как видите, «очень много букав» потребовалось, чтобы коротко и просто (с упрощениями) описать такой незатейливый опыт с моторчиком в подвесе.
С тем же моторчиком и разными подвесами и упорами можно провести ещё ряд опытов…
Это весьма познавательное занятие, которое ведёт к более чёткому пониманию процессов, происходящих на борту летательного аппарата с винтомоторной установкой (и балансирным управлением).
Потому, прошу бережно относиться к печатным символам в Ваших сообщениях по этой теме…
Ниже представлены две ссылки на подборки материала по рассматриваемому вопросу:
http://www.teoretmeh.ru/dinamika9.htm
(Краткая компеляция из «Механики» С.П.Стрелкова и «Теории гироскопов» К.Магнуса, правда, с небольшими ошибками, но с некоторыми интересными дополнениями примеров из других источников.)
http://teormech.ru/index.php/lections/lection/3
(Правила переноса сил. Из учебника «Теоретическая механика» …)
Similar threads
- Ответы
- 8
- Просмотры
- 3976
- Ответы
- 0
- Просмотры
- 5002
- Ответы
- 91
- Просмотры
- 33772
- Ответы
- 8
- Просмотры
- 10133
- Ответы
- 32
- Просмотры
- 10615
Поделиться: