Александр Лозовой
Автожиры!
- Откуда
- Рязань
Follow along with the video below to see how to install our site as a web app on your home screen.
Примечание: This feature may not be available in some browsers.
Вова, как считаешь?Orca сказал(а):Можно и шлиц убрать , но с ним узел будет работать пргнозированно без клина и перекосов .
Согласен, поддерживаю и работаю именно в этом направлении.susalev сказал(а):Геометрию головы менять нельзя!
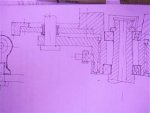
Если немного перефразировать известное изречение, то я бы сказал так: Да, снизу места нет. Но если сделать очень хочется, то приподнять корпус подшипника можно.susalev сказал(а):Снизу места нет! Ни укорачивать щечки, ни поднимать корпус подшипника!
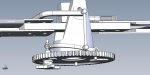
Как на пропеллерах Ivoprop. Прям как есть. К щечкам, по оси, сверху. Только редуктор побыстрее. А под зучатым диском два токосъемных кольца. Вот тогда точно не придется ничего менять ни в конструкции, ни в геометрии головки.На обычную голову механизм изменения шага!!!
Понимаешь Слава , шлиц воспринимает усилия возникающие в плоскости вращения ротора и при его наличии между венцом раскрутки и пальцем идущим к поводку можно сделать гарантированный зазор [highlight]и уйти от трения в этом месте [/highlight].
slavka33bis сказал(а):Эти сравниваемые нами силы, ятакдумаю, "несравнЕЕнны".
Можно предположить(?), что уголLev_D сказал(а):По поводу ходового винта. [highlight]У него два крайних положения[/highlight],
И ещё.Можно предположить(?), что угол между двумя крайними положениями может составлять 180 градусов?