Тема понеслась! Значит горячая!
Но вот какие вопросы возникли:
- В свое время когда я предлагал «переключатель» угла, там тоже была пружина, и это стало «камнем преткновения». Теперь и здесь появляется в ней необходимость.
- В случае если ее нет как в варианте Лозового, то есть подшипник со своим люфтом, потом люфт (зазор между обоймой и «рельсой» вернее ребордами диска), плюс зазор в направляющих обеспечивающих параллельность перемещения.
- усилия для изменения угла! Как у Половинкина непосредственное управление, а у него используется усилитель (ну можно и рычаг), в любом случае передача достаточного усилия через весь узел.
В итоге, т.к. нагрузка на этом узле знакопеременная, и усилия передаваемые через этот узел не маленькие, то все зазоры и неточности в изготовлении деталей, а так же упругая деформация (особенно диска). Будут складываться и создавать в условии маха лопасти и циклических нагрузках, вибрационные нагрузки которые и приведут к быстрому разрушению узла. Вспомните про автомат перекоса, этот узел делается прецеззионно! В итоге дорогой узел! Ресурсность как и работоспособность под вопросом.
В свою очередь:
Вот после видео от Лозового, где я понял ограничения:
1. макс. использовать готовые изделия.
2. нельзя занимать пространство под коромыслом в районе гл. подшипника.
3. макс. укоротить тяжелый хабар.
4. использовать для управления гибкий трос.
5. иметь 3 фиксированных положения управления углом.
6. минимизировать усилия на управлении шагом, (не как у Половинкина с усилителем).
Я правильно понял? Если да, то вот что получилось в моем предложении.
1. практически этот пункт выполняется.
2. исправил, и там синхронизирующего вала нет.
3. да макс. короткий.
4. да тросом.
5. 1-ое, положение установка на угол для прыжка, 2-ое, нейтральное, 3 -е, положение установка на угол авторатации.
6. усилия для управления шагом, ровно такие; как трение в тросе управления и привода "солдатиков".
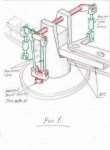
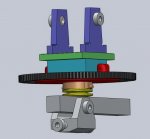
Ну а теперь по очереди, первый рис.:
Думаю, что по нему понятна вся механика, только объясню назначение синхронизирующих тяг и ходового винта. И здесь станет все понятно, когда представить, что у этого винта шаг 32мм. (ГОСТ 9484-81) и он фиксирующего типа (не возвратного),(самотормозящего). Этот винт может повернуться только на пол.оборота. И соответственно подъем синхро тяг будет 16мм. При этом расчет кинематики тяг позволяет изменить угол, на предположим 11град.
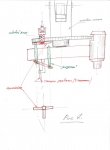
По второму рис. Здесь видно как именно управляются "солдатики". (Это как винт проворачивают рукой!) Они при "набегании" на них крыльчатки, осью которой является ходовой винт, поворачивают дважды этот винт и в итоге он может повернуться на 180град. Значит угол переключается за время двух оборотов ротора. Обратно точно так же, но уже другим "солдатиком", винт поворачивается обратно. Благодаря форме крыльчатки винт поворачивается только на 180град. Поэтому третье положение "солдатиков" просто чисто номинально.
Фиксация ходового вала происходит "трещеткой", как фиксируются передачи в КПП автомобиля, на рис. не показано. Здесь я выкладываю старые рисунки, сейчас этот узел прорисовываю в другом варианте и в программе что будет и читабельно, симметричном и по проще. Но смысл останется тем же.