Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Примечание: This feature may not be available in some browsers.
-
 Вышел новый выпуск программы ФлайтТВ, посвященный современным российским ЮПШ (юношеским планерным школам).
Вышел новый выпуск программы ФлайтТВ, посвященный современным российским ЮПШ (юношеским планерным школам).
Видео на Youtube. Ссылки на другие платформы и обсуждение в теме на форуме.
Вы используете устаревший браузер. Этот и другие сайты могут отображаться в нем неправильно.
Необходимо обновить браузер или попробовать использовать другой.
Необходимо обновить браузер или попробовать использовать другой.
БПЛА схема посадки любые идеи.

KAA
Ненавижу Солидворкс!
- Откуда
- Россия, Казань
На мой вгляд-нерабочая. Точнее-рабочая в штиль. Махровый авиамоделизм. А будет порывистый ветер метров 5-6, и опрокинется ещё до взлёта!Вполне рабочий вариант для своего разменного класса, я думаю.
Не совсем понятен функционал люков в консолях и носу...
Всё новое-хорошо забытое старое, только мало кто из инноваторов знает об этом. 😉 Вот БПЛА сделанный некогда в МАИ.
Вложения

На мой вгляд-нерабочая. Точнее-рабочая в штиль. Махровый авиамоделизм. А будет порывистый ветер метров 5-6, и опрокинется ещё до взлёта!
Всё новое-хорошо забытое старое, только мало кто из инноваторов знает об этом. Вот БПЛА сделанный некогда в МАИ.
Ну конечно авиамоделизм! Мы тут почти все от туда родом. 🙂
Не вижу принципиальной проблемы в том, что такой конвертоплан будет иметь ограничения по ветру. Не бывает ничего идеального для всех возможных условий.
Ну а МАИшники сделали модель, которая могла взлетать, но не могла садиться. Т.е. не сделали, по русски говоря.

А чё , сажали же планера и таймерки после 3х минут отлёта на авиамодельных саревнованиях, отклоняя стабилизатор на 45° и нормально садилисьПтичья посадка БПЛА. Без пробега.
https://youtu.be/uU0WDWV6au8

А будет порывистый ветер метров 5-6, и опрокинется ещё до взлёта!
Не так сложно и это предотвратить. Закрепить на утяжеленной платформе. И отпускать уже после набора полной тяги например.
Вполне рабочее решение: http://warspot.ru/6065-vms-meksiki-vooruzhilis-gibridnymi-bespilotnikami
Хотя, на счет продолжительности полета насвистели конечно...
Там ДВС 4т стоит. Электрика только для взлета и возможно что сбрасываемая.
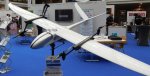
Vertical Takeoff and Landing
Airframe Monocoque composite
Wing Span 18' 6"
Length 9' 5"
Engine 190cc 4 Stroke
Fuel MOGAS
Typical MTOW 210 lbs
Typical Max Speed 72 kts
Endurance[highlight] 9-16 hours [/highlight](Payload Dependent)
Payload Capacity (Fuel + Usable Payload) 60 lbs
Main Payload Bay 4,100 + cubic inches
Rated Ceiling 15,000'
Flight and Recovery under Austere Conditions
Full autonomous operation, launch to land
vert
Я строю вертолеты!
- Откуда
- Южный Урал
L-Weg
Я строю долговременные планы, ИЧБХ постоянно
Каюсь, про соломку подстелить я забыл. Пена, сухой бассейн из чего угодно, шерсть-вата-или-заменители. Снег в конце-то концов.сесть на любую поверхность - на камни, на воду, асфальт и все остальное
Как всегда ссылка на очень информативный сайт https://nplus1.ru/news/2017/06/03/suwave
Канадский беспилотник заменит аэродром подскока озером

Инженеры из Шербрукского университета (Канада) разработали беспилотник самолетного типа, который предназначен для долгих автономных миссий. Для посадки в промежуточных точках летательному аппарату подходят водоемы, при этом дрон не боится волн или ветра. Доклад был представлен на конференции ICRA 2017, кратко о проекте рассказывает IEEE Spectrum.
Малые беспилотники, как правило, не могут выполнять длительные автономные миссии из-за сравнительно небольших по емкости аккумуляторов. В зависимости от конструкции время полета обычно ограничивается десятками минут или несколькими часами, однако это не подходит в тех случаях, когда требуется длительное автономное функционирование аппарата вдали от базы. Малые беспилотники самолетного могут нести на себе панели солнечных батарей, но из-за небольшой площади крыла вырабатываемой мощности недостаточно для непрерывного полета и такой дрон должен приземляться на время подзарядки, однако для приземления беспилотникам самолетного типа обычно требуется относительно плоская площадка. В авиации промежуточные аэродромы, предназначенные для увеличения радиусов полета, называют аэродромами подскока.
Канадцы разработали беспилотник, который способен в качестве аэродромов использовать водоемы. БПЛА под названием SUWAVE представляет собой летательный аппарат, построенный по схеме «летающее крыло». При необходимости подзарядить батареи SUWAVE приводняется в ближайшем водоеме и ждет, пока солнце достаточно зарядит аккумулятор. Дрон может выполнять долгие самостоятельные задания по мониторингу окружающей среды или, например, собирать образцы воды в разных водоемах при посадке.
В носовой части дрона установлен основной ротор на поворотной платформе, благодаря чему беспилотник способен взлетать вертикально и умеет переворачиваться солнечными панелями вверх, если он опрокинулся при приводнении или из-за волн. Дрон весом 584 грамма способен за раз преодолеть расстояние до 20 километров — по замыслу разработчиков беспилотника, такого расстояния должно хватать, чтобы добраться до соседнего водоема.


https://www.youtube.com/watch?v=n7awDhdVkCs
Послушайте по любому беспилотник не бывает без оператора, нужно его тренировать на ручную посадку, как то на слёте в Йошке смотрели -человек гонял радио управляемую пилотажку ночью в темноте и посадил её нормально, модель была подсвечена светодиодами, разным цветами с разных ракурсов чтоб определять его положение. Чем не идея?
Посадка и взлет должны быть автоматизированы иначе это сильно снижает ценность БПЛА требованиями к дорогому квалифицированному персоналу.
Если помните раньше были ПТУР первого поколения управляемые джойстиком ("Малютка" например). Оператора приходилось долго учить на тренажере но затем он работал хорошо. Но вот беда - после ухода из армии квалификация оператора быстро терялась и на сборах были одни промахи...
Затем появилось второе поколение где нужно просто держать визир на цели пока ракета летит. А затем и третье где надо показать ракете танк а после пуска можно сразу уходить.
Так и с БПЛА. Заказчик выберет тот у которого требования к квалификации персонала ниже.
Если помните раньше были ПТУР первого поколения управляемые джойстиком ("Малютка" например). Оператора приходилось долго учить на тренажере но затем он работал хорошо. Но вот беда - после ухода из армии квалификация оператора быстро терялась и на сборах были одни промахи...
Затем появилось второе поколение где нужно просто держать визир на цели пока ракета летит. А затем и третье где надо показать ракете танк а после пуска можно сразу уходить.
Так и с БПЛА. Заказчик выберет тот у которого требования к квалификации персонала ниже.
Так ведь авиация, потдержание летной годности это требование, пока китайцы нам не придумают чистый беспилотник, придётся вручную сажать и со светодиодами🙂
Кстати как то по телеку показали работу амерских больших боевых беспилотников, вроде оператор его подымал и сажал вручную джойстиком. Т.ч менеджерам придётся согласится, обслуживать беспилотник дешевым сантехником не получиться
Кстати как то по телеку показали работу амерских больших боевых беспилотников, вроде оператор его подымал и сажал вручную джойстиком. Т.ч менеджерам придётся согласится, обслуживать беспилотник дешевым сантехником не получиться
На больших можно и джойстиком рулить. Их мало они дорогие и дорогой хорошо обученный персонал не составит погоды в цене вопроса. Хотя они могут автоматически.
Но вот для более мелких и массовых БПЛА уровня армейских подразделений сухопутных сил или для гражданских заказчиков или всяких пожарных, ГО и ЧС нужна полная автоматизация взлета-посадки.
Но вот для более мелких и массовых БПЛА уровня армейских подразделений сухопутных сил или для гражданских заказчиков или всяких пожарных, ГО и ЧС нужна полная автоматизация взлета-посадки.
Ну да, каждому своё, я кстати думал о химике
Для химика придется код для автопилота дорабатывать. Выбрать готовую платформу с открытым кодом - PixHawk например. Поставит на мелкий недорогой носитель и отлаживать полет. Самая большая проблема будет в выдерживании высоты именно от поверхности земли. Модельных радиовысотомеров я не знаю. Можно лазерный дальномер попробовать приспособить. Обычный высотомер баро на коптерах имеет погрешность где то 20 см. Но поле может иметь перепады высот в 10 метров а надо летать 2-3 метра...
А ультразвуковой датчик? типа тех что в парктрониках, они есть с дальностью 10 и дальше метров
Этот принцип работы сильно зависит от поверхности. От твердых машин звуки отражаются хорошо. А вот от зеленых насаждений на поле не уверен. Но надо попробовать.
Есть еще проблема - надо щупать высоту от поверхности чуть впереди по курсу. Чтобы было время для коррекции высоты.
Similar threads
- Ответы
- 7
- Просмотры
- 616
Поделиться: