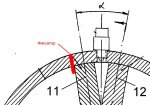
Я считаю, что в РЛД есть 4 мертвых точки поршней:
11 – передняя стенка камеры сгорания
12 – задняя стенка камеры сгорания
21 – передняя стенка камеры выпуска
22 - задняя стенка камеры выпуска
Фиксатор будет держать переднюю стенку камеры сгорания 11 во время сжатия смеси. Как только произойдёт воспламенение горючей смеси, фиксатор должен отпустить переднюю стенку камеры сгорания. Задняя стенка камеры сгорания после воспламенения останется на месте, потому что поршни могут двигаться только вперед.
Здесь не будет потери мощности на фиксаторе. Потому что не будет такого аварийного случая, когда воспламенение смеси произошло, а передняя стенка камеры сгорания осталась на месте. И задняя стенка тоже обратно не может пойти. Тогда будет авария и разорвёт двигатель.
11 – передняя стенка камеры сгорания
12 – задняя стенка камеры сгорания
21 – передняя стенка камеры выпуска
22 - задняя стенка камеры выпуска
Фиксатор будет держать переднюю стенку камеры сгорания 11 во время сжатия смеси. Как только произойдёт воспламенение горючей смеси, фиксатор должен отпустить переднюю стенку камеры сгорания. Задняя стенка камеры сгорания после воспламенения останется на месте, потому что поршни могут двигаться только вперед.
Здесь не будет потери мощности на фиксаторе. Потому что не будет такого аварийного случая, когда воспламенение смеси произошло, а передняя стенка камеры сгорания осталась на месте. И задняя стенка тоже обратно не может пойти. Тогда будет авария и разорвёт двигатель.