Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Примечание: This feature may not be available in some browsers.
Вы используете устаревший браузер. Этот и другие сайты могут отображаться в нем неправильно.
Необходимо обновить браузер или попробовать использовать другой.
Необходимо обновить браузер или попробовать использовать другой.
Пилотируемый квадракоптер
A
aerobaika
конечно есть отступления--но желательно людей убирать из плоскости вращения винтов или винты отодвигать!!!
vert
Я строю вертолеты!
- Откуда
- Южный Урал
Не понятно про органы управления. Это получается что и троса-тяги рулей через плоскость винтов вести нельзя ? Тогда как же все двухмоторные самолеты летают ?
Читаем ответы 598 и 599 -" за исключением тросов и тяг управления".
G
gimcrack
https://hi-tech.mail.ru/news/russian-hoverbike-scorpion1/
Тёзка! Вот только скажи мне, а что в этом "Scorpion 1" российского? Пилот?
questioner
Наверное все мы рождены летать...
- Откуда
- Оренбург
Двигатели слишком слабые у них - вот он и не может толком стабилизироваться. Видимо использовали авиамодельные. И разносить их нужно подальше.
S
slavka33bis
25 кВт один двигатель.
questioner
Наверное все мы рождены летать...
- Откуда
- Оренбург
25 кВт один двигатель.
Действительно.. Значит систему управления нужно дорабатывать. И странное расположение центра тяжести, почему он выше линии винтов, да еще и настолько?
Вот такое чудо со всех сторон неправильное и то летает.
- Откуда
- Россия, Крым
Вероятно, чтобы пилот не находился в плоскости вращения винтов.И странное расположение центра тяжести, почему он выше линии винтов, да еще и настолько?
Очень сырой проект. Пилот борется с контроллером полёта, который вероятно взят с игрушечной модели и совершенно не приспособлен для таких масс, инерции и центровки. Для таких аппаратов должно быть написанно индивидуальное, адаптивное ПО с долгой доводкой и "обучением" системы стабилизации.
И конечно поспешили с презентацией - лишь бы что то показать. Подобные проекты имеют большой резонанс в СМИ, тем более громкое "первый российский", поэтому и представлять их нужно во всей красе, а не как цирковой трюк на грани фола... Или вообще не показывать. :-/
Всё вышесказанное - лишь моё мнение, могу ошибаться.
questioner
Наверное все мы рождены летать...
- Откуда
- Оренбург
Так у него ноги в этой плоскости. Мне кажется все-таки это недодумка. Сделали это проект энтузиасты особо не парясь :~)Вероятно, чтобы пилот не находился в плоскости вращения винтов.
Полностью согласен. Но писать собственное ПО управления - задачка та еще. Поленились ребятки, хотелось скорее в небо... Не убились бы только.Пилот борется с контроллером полёта, который вероятно взят с игрушечной модели и совершенно не приспособлен для таких масс, инерции и центровки. Для таких аппаратов должно быть написанно индивидуальное, адаптивное ПО с долгой доводкой и "обучением" системы стабилизации.
Хотя это видео только доказывает, что вполне можно управлять стабилизацией мультикоптера лишь оборотами без всяких автоматов перекоса.
1. Нужно расположить центр тяжести ниже плоскости винтов
2. Нужно организовать рекурсивную схему (как на гибридных автомобилях) разгона/торможения диаметрально противоположных винтов. Когда один винт разгоняется, другой должен пропорционально тормозиться с возвратом энергии в систему.
3. Если винтов будет не 4, а скажем 6 или 8, а мощность двигателей останется той же, процессор побыстрее, гироскопы подороже... все получится.
Лет через десять будут конструкторы таких аппаратов на ардуино продавать ;D
G
gimcrack
Лет через десять будут конструкторы таких аппаратов на ардуино продавать
Поверите Вы или нет, мне всё равно. Но через 10 лет (а я думаю что раньше) мир будет передвигаться на этих аппаратах.
Правда не в России, у нас будет стоят повсеместный колокольный звон, способный переместить человека только в прошлое...
- Откуда
- Брянская обл.
На аппарате с жесткими винтами это не имеет никакого значения.1. Нужно расположить центр тяжести ниже плоскости винтов
Если квадр нужен только для того чтобы повисеть в своем огороде, то да - доказывает.Хотя это видео только доказывает, что вполне можно управлять стабилизацией мультикоптера лишь оборотами без всяких автоматов перекоса.
В квадрокоптерах моделях нет пилотов, поэтому испытывать чудовищные вибрации от работы жестких винтов в условиях косой обдувки там просто некому. К тому же летают они в основном на скорости 60 - 80 км/ч. Для пилотируемого аппарата это просто нисколько.
Так что, без автоматов перекоса (можно только продольных) ну никак, потому что только АП способен более-менее выровнять аэродинамические моменты по ометаемому диску. А раз есть АП, то общий шаг сам Бог велел сделать. Ну а раз есть ОШ, то как бы электричество со своими контроллерами теряет смысл. Что думаете? 🙂
questioner
Наверное все мы рождены летать...
- Откуда
- Оренбург
Никакого? точно?На аппарате с жесткими винтами это не имеет никакого значения.
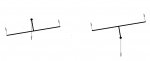
А векторы сил представить? Какой груз устойчивее подвешенный или стоящий на палке? Когда центр тяжести смещается относительно вертикальной оси, то если он выше винтов, то сила тяжести выводит аппарат из равновесия, а если ниже - возвращает. И причем здесь "жесткость" винтов?
Вложения
- Откуда
- Брянская обл.
Видите ли! Гравитация земли действует только на центр тяжести аппарата, ей абсолютно без разницы в какой ориентации находится сам аппарат. Все другие силы рандомны, куда они дуют, туда и повернется аппарат. Пример который вы привели с ниткой и палочкой походит к воздушному шару. Вот в том да, имеется уже две силы - Архимедова и Гравитации, они всегда на одной прямой, но противоположно направленны. Они то и растягивают/выравнивают аппарат.
Что касается жестких винтов, то здесь сложнее на пальцах не объяснить. Т.е. есть системы где имеет заначение тянет винт или толкает. С жесткими винтами без разницы, потому что их вектор относительно ЦМ постоянен хоть в том случае, хоть в этом.
Но винты внизу все равно хуже чем в верху, по другим соображениям.
П.с. Картинка, которую вы нарисовали обманчива.
Что касается жестких винтов, то здесь сложнее на пальцах не объяснить. Т.е. есть системы где имеет заначение тянет винт или толкает. С жесткими винтами без разницы, потому что их вектор относительно ЦМ постоянен хоть в том случае, хоть в этом.
Но винты внизу все равно хуже чем в верху, по другим соображениям.
П.с. Картинка, которую вы нарисовали обманчива.
G
gimcrack
@questioner, да незаморачивайся ты так сильно.
Просто сиди и изобретай! Цивилизация двигается семимильными шагами
(не в России) это уже завтрашний день, именно завтрашний.
Тот кто не успел - тот уже опоздал. Сегодня уже можно летать и испытывать...
электрокоптеры просто имея элементарный ангар и питание с наружного блока кабелем.
Удачи!
Просто сиди и изобретай! Цивилизация двигается семимильными шагами
(не в России) это уже завтрашний день, именно завтрашний.
Тот кто не успел - тот уже опоздал. Сегодня уже можно летать и испытывать...
электрокоптеры просто имея элементарный ангар и питание с наружного блока кабелем.
Удачи!
questioner
Наверное все мы рождены летать...
- Откуда
- Оренбург
Чем и занимаюсь. Пока учу матчасть - двигатели, микроконтроллеры.Просто сиди и изобретай!
questioner
Наверное все мы рождены летать...
- Откуда
- Оренбург
:-X без комментариевП.с. Картинка, которую вы нарисовали обманчива.
- Откуда
- Брянская обл.
Ну тогда я прокомментирую. Стрелка направленная вниз к центру Земли исходит из ЦМ и поворачивать аппарат никак не может.без комментариев
Вложения

G
gimcrack
Чем и занимаюсь. Пока учу матчасть - двигатели, микроконтроллеры.
Хороший мальчик! Посвяти меня основам, лучше в личке!
questioner
Наверное все мы рождены летать...
- Откуда
- Оренбург
:'(
Посмотрите на ваш рисунок, ну неужели без бла-бла-бла не ясно, как ведет себя система? Математика - костыль, созданный в попытке увековечить знания. Сами же знания имеют отношение не к математике, а к явлениям и процессам, которые можно наблюдать в объективном Мире с помощью наших органов чувств.
Возьмите и сделайте из спичек, термоклея и железной гаечки то, что изображено на рисунке. Потом подвесте за ниточки и попробуйте за них понаклонять, как делают это винты в попытках стабилизации. Попробуйте вверх гаечкой и вниз. Почувствуйте разницу.
Один мыслитель так засчитался, что предлагал мне в моменте инерции килограммы перевести в ньютоны. А потом разницу в оборотах в минуту перевел в обороты в секунду и начал вычитать эту разницу опять из оборотов в минуту.... это все здесь, несколькими страницами ранее...
Люди, вы же РАЗУМНЫЕ, что с вами происходит?!
Один мыслитель так засчитался, что предлагал мне в моменте инерции килограммы перевести в ньютоны. А потом разницу в оборотах в минуту перевел в обороты в секунду и начал вычитать эту разницу опять из оборотов в минуту.... это все здесь, несколькими страницами ранее...
Люди, вы же РАЗУМНЫЕ, что с вами происходит?!
Поделиться: