Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Примечание: This feature may not be available in some browsers.
Вы используете устаревший браузер. Этот и другие сайты могут отображаться в нем неправильно.
Необходимо обновить браузер или попробовать использовать другой.
Необходимо обновить браузер или попробовать использовать другой.
Мечты не одного поэта.

Velko Velkov
Я люблю строить махолеты!
Надеюсь, что эта информация будет полезной, интересной или любопытной для участников этого форума-
http://www.geocities.com/Eureka/Boardroom/9483/
http://www.youtube.com/watch?v=OsO0vu-GClM
velko
http://www.geocities.com/Eureka/Boardroom/9483/
http://www.youtube.com/watch?v=OsO0vu-GClM
velko
или любопытной для участников этого форума-
-в предлагаемой конструкции большую часть мощности дают руки
=правильное ли это решение\ноги значительно мощнее\?!
http://www.airbikeuk.co.uk/arc.htm
-[ch1080][ch1085][ch1090][ch1077][ch1088][ch1077][ch1089][ch1085][ch1086][ch1077] [ch1087][ch1088][ch1080][ch1084][ch1077][ch1085][ch1077][ch1085][ch1080][ch1077] "[ch1084][ch1103][ch1075][ch1082][ch1086][ch1075][ch1086]" [ch1082][ch1088][ch1099][ch1083][ch1072].
http://www.airbikeuk.co.uk/voyager.htm
-[ch1101][ch1090][ch1086][ch1081] [ch1078][ch1077] [ch1092][ch1080][ch1088][ch1084][ch1099] [ch1082][ch1088][ch1099][ch1083][ch1086] [ch1089] [ch1085][ch1077][ch1090][ch1080][ch1087][ch1080][ch1095][ch1085][ch1086][ch1081] [ch1087][ch1077][ch1088][ch1077][ch1076][ch1085][ch1077][ch1081] [ch1082][ch1088][ch1086][ch1084][ch1082][ch1086][ch1081]!
http://www.airbikeuk.co.uk/supine-airbike.htm
-[ch1087][ch1072][ch1088][ch1091] [ch1076][ch1077][ch1090][ch1072][ch1083][ch1077][ch1081]...
-[ch1080][ch1085][ch1090][ch1077][ch1088][ch1077][ch1089][ch1085][ch1086][ch1077] [ch1087][ch1088][ch1080][ch1084][ch1077][ch1085][ch1077][ch1085][ch1080][ch1077] "[ch1084][ch1103][ch1075][ch1082][ch1086][ch1075][ch1086]" [ch1082][ch1088][ch1099][ch1083][ch1072].
http://www.airbikeuk.co.uk/voyager.htm
-[ch1101][ch1090][ch1086][ch1081] [ch1078][ch1077] [ch1092][ch1080][ch1088][ch1084][ch1099] [ch1082][ch1088][ch1099][ch1083][ch1086] [ch1089] [ch1085][ch1077][ch1090][ch1080][ch1087][ch1080][ch1095][ch1085][ch1086][ch1081] [ch1087][ch1077][ch1088][ch1077][ch1076][ch1085][ch1077][ch1081] [ch1082][ch1088][ch1086][ch1084][ch1082][ch1086][ch1081]!
http://www.airbikeuk.co.uk/supine-airbike.htm
-[ch1087][ch1072][ch1088][ch1091] [ch1076][ch1077][ch1090][ch1072][ch1083][ch1077][ch1081]...
Привет. Вот как бывает: пришёл, а компа опять нет. Вот только сегодня принесли. Правда, хватило сил только прочесть. Надеюсь, завтра смогу (отстреляться). Одно могу сказать, благодаря всему, что я узнал на этом форуме, особенно в крайних постах, я стал уверен на 90% в своей концепции махолёта, - это дельтакрыло :IMHO
- Откуда
- Саратовская обл.
\\\, я стал уверен на 90% в своей концепции махолёта, - это дельтакрыло :IMHO
[highlight] Пора начать[/highlight] разработку такого крыла??! :-?
Есть несекретные концепты в этой связи? :🙂
Re: Мечты не одного поэта...
Ответ #1100 - 04.07.09 :: 13:19:39 Отметить & Цитировать Цитировать
vi64 писал(а) 29.06.09 :: 20:13:33:
есть где это посмотреть?
http://www.gorpol.pl/?site=31&artykul=69#powieksz
-на четвёртом снимке аэродрома у правого конца ВПП видно четыре десятиэтажек за которыми летела Цессна на последнем ПИКНИКЕ.
Наконец я смог посмотреть их! Класные фото!!!!!!!! 😀
Ответ #1100 - 04.07.09 :: 13:19:39 Отметить & Цитировать Цитировать
vi64 писал(а) 29.06.09 :: 20:13:33:
есть где это посмотреть?
http://www.gorpol.pl/?site=31&artykul=69#powieksz
-на четвёртом снимке аэродрома у правого конца ВПП видно четыре десятиэтажек за которыми летела Цессна на последнем ПИКНИКЕ.
Наконец я смог посмотреть их! Класные фото!!!!!!!! 😀
Пора начать разработку такого крыла??!
http://www.bookrags.com/wiki/Powered_hang_glider
-s motorami...
http://www.humanpoweredflying.propdesigner.co.uk/html/flights.html
-PROPELLER EFFICIENCY
http://www.humanpoweredflying.propdesigner.co.uk/html/other__70_s_planes.html
-uze mnogo sdielano...
http://www.humanpoweredflying.propdesigner.co.uk/index.html
-s natshala i do konca...
Пора начать разработку такого крыла??! Озадачен
Есть несекретные
концепты в этой связи? Круглые глаза
Имею несколько вариантов. Я готов обсудить...
Относительно секретов, я не знаю что делать с этим "камнем". Думаю в процессе всё разрулится. :🙂
- Откуда
- Саратовская обл.
\\\-uze mnogo sdielano...\\\
Спасибо Хенрик! Промотрел,кажется там даже мускульный экраноплан!? :-? 🙂
Пора начать разработку такого крыла??!
Привет. в общем-то я уже начал. Нашёл спонсора. Даже, пожалуй, компаньона. а за одно и товарища. Это произошло два с половиной года тому назад. Меня приняли на работу официально, Мы определились с задачами, и я принялся за работу. Мне нужно было на выделенной в цеху территории построить отдельный цех, оборудовать его, и заниматься постройкой аппарата. Кроме этого мне нужно было заниматься и более прозаичными задачами. Я взял на себя ответственность по открытию и развитию нового тех. процесса по покрытию нашего выпускаемого оборудования защитным декоративным композитным слоем.
Цех я построил, оборудовал его. Тех. процесс заработал, с хорошими показателями экономии (только по материалам уменьшилась в три раза, раньше стоимость была 3500гривен, а стало стоить 1200гр. ). Да и стала намного проще. До внедрения на подготовку и покраску уходило около 2 недель для пятерых человек. после внедрения, комплекс выходил с малярки за 7 дней, и управлялись три менее квалифицированных маляра. Параллельно я занимался цехом и аппаратом.
Мне удалось построить для крыла стапель, собрать два пакета нервюр, придумать способ сваривания поликарбоната, и приступить к сборке крыла. Но затем пошла полоса чёрная.
Я попал в больницу, меня прооперировали (шеф дал мне безвозмездно на лечение 2000$). А затем начался кризис...... прекратилась продажа, производство стало, я уже не работаю более 6 месяцев. Половина предприятия готовят к банкротству....... в общем...........
Жаль шефа. Как раз перед этим он купил два станка по лимону баксов....... А я теперь отдыхаю 😛
- Откуда
- Саратовская обл.
Привет. в общем-то я уже начал. Нашёл спонсора. \\\\\в общем...........
Жаль шефа. Как раз перед этим он купил два станка по лимону баксов....... А я теперь отдыхаю 😛
Желаю скорейшего выздоровления! 🙂 Как покажется концепт гибкого крыла?? :-?
Вложения
Re: Мечты не одного поэта...
Ответ #1052 - 23.06.09 :: 20:02:47
А вот здесь http://www.ornithopter.de/gelenk.htm
представлено развитие идей Хольста на примере EV8: - с суставом в крыле... аэроэластично взаимодействущим с воздухом.
Крыло обтянуто эластичной пленкой, не препятствующей крутильным деформациям крыла...
Добрый день 🙂 В этом посте, составленным Виктором, хочу уделить внимание на весьма обстоятельной работе проф. Хольстена. Они глубоко изучили механику машущего полёта, и очень чётко выделил основное зерно в процессе маха крыла. Это прежде всего эластичность самого крыла, а точнее эластичность оболочки профиляобразующей, которая необходима для автоматической установки угла атаки профиля крыла(в доль САХ)в процессе махового движения.
Пример исполнения машущего крыла с элементами, служащими для кручения консоли, усиления угла ее маха и демпфирования силы инерции в верхнем положении крыла (при перемене направления маха).
Нижний лонжерон - дополнительный. Его угловой поворот служит для управления углом атаки консоли.
Корневаянервюра неподвижна по углу атаки (около 4,5 градусов), остальные нервюры сидят на главном углепластиковом круглом лонжероне свободно...
На нижнем рисунке пояснен принцип "суставного крыла".
Одно только угловое управление вспомогательным лонжероном вызывает как изменение угла атаки консоли, так и ее дополнительное маховое перемещение, которые согласованы друг с другом...
А это в свою очередь выдаёт необходимый вектор, по всему профилю. Для этого ему пришлось очень тщательно отработать все ключевые узлы, чтобы крыло имело необходимые степени свободы, как у птицы. Правда совсем как у птицы не получилось. Птица имеет шарниры плечевого сустава, и локтевого сустава, которые дают возможность быстро получить асимметрию несущих полу крыльев, путем изменения геометрии полукрыльев, с последующим перенесением фокуса несущей поверхности по правую или по левую стороны от продольной оси симметрии аппарата. Попросту прф. Хольстен получил хороший аппарат тяги, но летательный аппарат быстро адаптирующийся в воздушной среде для поддержания необходимой ориентации в пространстве пока не получил. Мне конечно можно возразить, модель имеет хвостовое оперение... но не большая модель может удовлетворительно управляться, а полноразмерная... Что в последствии на испытании подобного полноразмерного орнитоптера привело к аварии. Слава Богу не значительной.
А теперь задам вопрос, а стоило ли так изощряться? Вообще то стоило. Крыло большого удлинения имеет высокое качество, а оно (качество) никогда не лишнее, и очень полезно на аппаратах для выполнения полёта на большие расстояния с малыми затратами. А вот позаботится о управляемости и безопасности аппарата с таким крылом, прийдётся при помощи других средств.
К решению этой технической задачи нужно подходить шире. Необходимо сочитать тягу и управление. В этом случае получим аппарат летучий и высоко манёвренный. Для примера я предлагаю летучую мышь, из подвида рукокрылые. Их маневренности, и диапазону скоростей можно только позавидовать. Их летательный аппарат имеет вид хорошо растянутой гибкой мембраны, которая образует легко трансформируемый профиль. Растяжка мембраны-купола обеспечивается за счёт костей передних и задних конечностей. Очень развиты и удлиненны фаланги, которые способны менять профиль несущей поверхности. Задние конечности и у некоторых особей продолжение позвоночника, (фост) соединены перепончатой мембраной, которые выполняют в полёте несколько функций. Несущая, и управляющая, а также участвуют в создании тяги.
Процесс машущего полёта происходит в основном после старта. Рукокрыл стартует после того как освобождается от подвешенного состояния при помощи своих цепких задних конечностей, которыми он за что то держится, пикируя в низ головой. После набора необходимой скорости полёт может выровняться и быть горизонтальным. При медленном полёте махи не частые, и амплитуда махов очень мала. Полёт может протекать на удивление медленно. Иногда мне казалось, что мыш почти зависает. Вдруг резко не с того не сего мыш делал резкий взмах, и практически телепортировался в другую точку пространства. Сам мах протекал так: Не заметный и не большой в верх, и за тем мощный и интенсивный в низ. Как правило этот рывок являлся одновременно и виражом. При этом сам процесс я рассмотрел так: передние конечности уходя в низ, всегда создавали крутку общей несущей плоскости, и САХ крыла в движении имела отрицательный угол атаки, образуя при этом необходимый вектор, мах мог быть очень глубоким, таким как бы хлопком, под животом, и таким же на верху, за спиной. Такие движения с хлопками я наблюдал у голубей. Из за этого воздух вытесняемый между двух поверхностей давал усиленную реактивную тягу. Раскрываясь два захлопнутых крыла втягивали в закрытое пространство воздух, получали дополнительную вакуумную тягу, следующая фаза была похожая на описанную выше (мах в низ) только наоборот, с образующим вектором в необходимую сторону. При этом фаланги могли и играли роль рулей, сжимаясь, расширяясь, изгибаясь, благодаря чему увеличивая, или уменьшая несущую площадь одного крыла по отношению к другому. Задние конечности и фост синхронно работали, и могли участвовать не только в управлении но и усиливать вектор тяги, за счёт синхронных волновых движений всего туловища, напоминающие движения человека амфибии.
Жаль что нужно убегать на вахту, очень хотелось продолжить, и провести аналогию с дельтакрылом.
пока :craZy
Спасибо за пожелания. Я думаю что здоровье у меня стабилизировалось,и уже в норме.Как покажется концепт гибкого крыла??
ИНТЕРЕСНО Я думаю, что хорошобы кое что уточнить и добавить. Жаль что убегаю. Мне на вахту к 19.00
надеюсь до завтра.
:craZy
Привет.
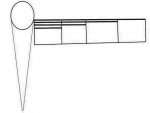
Я думаю, что ты изобразил фюз с половинкой крыла. Утончённая - это задняя часть, утолщённая - передняя. Крыло разделено на 4 фрагмента. К каждому из них тянутся толстые чёрные линии. Думаю, что они выполняют роль связующих элементов для каждого из фрагментов крыла. Служат они для определённой установки угла атаки. Само крыло имеет гибкую профиле образующую. Поправь, ежели что не так
Привет.
Слав, извини, мне очень трудно сразу ухватить твою идею. Я тебя понимаю, так наверное и вам трудно понять меня, когда я пытаюсь выложить то, что возникло в моей голове. Давай уточним.Как покажется концепт гибкого крыла?? Озадачен
Я думаю, что ты изобразил фюз с половинкой крыла. Утончённая - это задняя часть, утолщённая - передняя. Крыло разделено на 4 фрагмента. К каждому из них тянутся толстые чёрные линии. Думаю, что они выполняют роль связующих элементов для каждого из фрагментов крыла. Служат они для определённой установки угла атаки. Само крыло имеет гибкую профиле образующую. Поправь, ежели что не так
- Откуда
- Саратовская обл.
\\\ тянутся толстые чёрные линии. Думаю, что они выполняют роль связующих элементов для каждого из фрагментов крыла\\\
Верно, и каждая при махе ещё как торсион работает........конец крыла при взмахах при этом имеет максимальные изменения угла атаки! Всё как у птиц.........! :-? 🙂
1. Это прежде всего эластичность самого крыла, а точнее эластичность оболочки профиляобразующей в комплексе, которая необходима для автоматической установки угла атаки профиля крыла(в доль САХ)в процессе махового движения.
2........-машущего крыла с элементами, служащими для кручения консоли.......
... крутильным деформациям крыла...
3. Корневаянервюра неподвижна по углу атаки (около 4,5 градусов), остальные нервюры сидят на главном углепластиковом круглом лонжероне свободно...
Эти выбранные,и выделенные качества очень важны для наличия необходимого вектора у махолётов. Все они имеются у рукокрылов.
Теперь ещё раз хочу обратить внимание на дельтакрыло. Оно имеет две основные системы, которые образуют несущую поверхность крыла.
1. Это каркас из дюралевых труб,

2. Обшивка крыла. Ещё её называют "Парус".
На этой картинке я нарисовал все элементы стандартного дюралевого силового каркаса или скилеит крыла. Он состоит из основных несущих элементов,
Две боковые трубы,(цвет коричневый) они образуют передние кромки, или лобик профиля левого и правого полукрыльев .
Килевая труба, (цвет коричневый) Этот элемент проходит по продольной оси симетрии крыла, и выполняет несколько функций. Основная, растянуть крыло по продольной оси симметрии
Поперечина, красного цвета. Состоит из двух труб равной длинны, в средине шарнир одной степени свободы. Разводит и удерживает боковые трубы консоли на определённый угол. Соеденяется с боковыми шарнирными узлами расположенными на средине боковых труб консолей
Носовой узел. Это шарнир, имеет свободу в горизонтальной плоскости для килевой,и двух боковых труб.
На картинке они коричневого цвета. Килевая проходит под поперечиной на определённом расстоянии (показаночёрным цветом).
3. Система тросовых растяжек.
Состоит:
3.1 Тросовые растяжки верхней и нижней разводки(тонкие чёрные линии)
3.2 Мачта, (жёлтая) поддерживающая боковые консоли, и килевую балку.
3.3 Трапеция, (чёрный треугольник с низу) к ней сводятся 6 нижних тросовых растяжек. Они несут основную нагрузку во время полёта, удерживая консоли и килевую от (складывания).
2........-машущего крыла с элементами, служащими для кручения консоли.......
... крутильным деформациям крыла...
3. Корневаянервюра неподвижна по углу атаки (около 4,5 градусов), остальные нервюры сидят на главном углепластиковом круглом лонжероне свободно...
Эти выбранные,и выделенные качества очень важны для наличия необходимого вектора у махолётов. Все они имеются у рукокрылов.
Теперь ещё раз хочу обратить внимание на дельтакрыло. Оно имеет две основные системы, которые образуют несущую поверхность крыла.
1. Это каркас из дюралевых труб,
2. Обшивка крыла. Ещё её называют "Парус".
На этой картинке я нарисовал все элементы стандартного дюралевого силового каркаса или скилеит крыла. Он состоит из основных несущих элементов,
Две боковые трубы,(цвет коричневый) они образуют передние кромки, или лобик профиля левого и правого полукрыльев .
Килевая труба, (цвет коричневый) Этот элемент проходит по продольной оси симетрии крыла, и выполняет несколько функций. Основная, растянуть крыло по продольной оси симметрии
Поперечина, красного цвета. Состоит из двух труб равной длинны, в средине шарнир одной степени свободы. Разводит и удерживает боковые трубы консоли на определённый угол. Соеденяется с боковыми шарнирными узлами расположенными на средине боковых труб консолей
Носовой узел. Это шарнир, имеет свободу в горизонтальной плоскости для килевой,и двух боковых труб.
На картинке они коричневого цвета. Килевая проходит под поперечиной на определённом расстоянии (показаночёрным цветом).
3. Система тросовых растяжек.
Состоит:
3.1 Тросовые растяжки верхней и нижней разводки(тонкие чёрные линии)
3.2 Мачта, (жёлтая) поддерживающая боковые консоли, и килевую балку.
3.3 Трапеция, (чёрный треугольник с низу) к ней сводятся 6 нижних тросовых растяжек. Они несут основную нагрузку во время полёта, удерживая консоли и килевую от (складывания).
Вложения
Привет, Это две картинки, помогут мне объяснить как происходит управление крылом.
На этих картинках я попытался изобразить вид дельтаплана с тыла. Когда пилоту нужно сделать какой то манёвр , ему необходимо оттолкнуть от себя поперечную ручку трапеции, либо потянуть её на себя. В этом случае аппарат изменит угол атаки, этот манёвр даёт управление по тангажу.
Чтобы выполнить вираж, пилот должен быть уверен в том,что аппарат имеет необходимую скорость, с учётом того, что аппарат после окончания манёвра значительно уменьшит скорость, и если пилот не позаботится о запасе скорости, то он потеряет возможность управлять аппаратом, и пока не на берёт необходимую скорость, аппарат будет бесконтрольно падать. Для этого выполняется стандартный манёвр, ручка на себя, в сторону, и почти одновременно от себя, и опять на себя. Практически выполнить движение ручки по кругу, со смещением, в противоположную сторону от нужного виража.
На этих картинках я попытался изобразить вид дельтаплана с тыла. Когда пилоту нужно сделать какой то манёвр , ему необходимо оттолкнуть от себя поперечную ручку трапеции, либо потянуть её на себя. В этом случае аппарат изменит угол атаки, этот манёвр даёт управление по тангажу.
Чтобы выполнить вираж, пилот должен быть уверен в том,что аппарат имеет необходимую скорость, с учётом того, что аппарат после окончания манёвра значительно уменьшит скорость, и если пилот не позаботится о запасе скорости, то он потеряет возможность управлять аппаратом, и пока не на берёт необходимую скорость, аппарат будет бесконтрольно падать. Для этого выполняется стандартный манёвр, ручка на себя, в сторону, и почти одновременно от себя, и опять на себя. Практически выполнить движение ручки по кругу, со смещением, в противоположную сторону от нужного виража.
Вложения
Similar threads
- Ответы
- 2
- Просмотры
- 1479
- Ответы
- 0
- Просмотры
- 487
- Ответы
- 111
- Просмотры
- 8878
Поделиться: