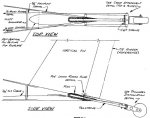
А рпикиньте: мысленно разверните вилку на 180 градусов - и легко убедиться, что хвост несколько опустился Этгого достаточно для вывода, что вилка и будет стремиться к положению, когда хвост будет ниже всего.Повернув ось наоборот ( верхняя часть оси - вперед), видно, что самое нижнее положение хвост имеет как раз в нейтрали - это положение колеса устойчиво.😱 Эт как-же?Ось поворотной вилки колеса должна быть вертикальной или иметь небольшой наклон вперед. Сейчас колесо находится в неустойчивом положении, вес самолета будет стремиться развернуть колесо на 180 гр.
Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Примечание: This feature may not be available in some browsers.
Вы используете устаревший браузер. Этот и другие сайты могут отображаться в нем неправильно.
Необходимо обновить браузер или попробовать использовать другой.
Необходимо обновить браузер или попробовать использовать другой.
Самолет АСА-2.
Если честно, чувство правильности выбора положения оси колеса, так же как и его формы у меня нет. Например на модельке, для обеспечения сносной управляемости, то есть вменяемой и максимально выстрой реакции рулевой машинки, пришлось практически совместить ось поворота колеса и руля направления и максимально близко разместить ее от оси вращения. То есть то, что сейчас на Квике, ранняя модификация уже сделано шасси. Кстати, управляемость касается именно на нулевых или около нулевых скоростях, на разбеге подобный вариант наоборот зарекомендовал себя довольно неплохо, колебания на разбеге длиннопереодические, оператором отсекаемые легко, реакция на руль бодрая, но и усилий требующая немалых. Более поздний вариант добавил избыточную управляемость на разбеге, для дрифта самое оно, но разбегаться не комфортно. Есть подозрение, что вынос оси вращения, угол наклона оси стойки, плечи на кронштейнах руля направления, педалях, и соответственно, самой стойки, имеют имеющиеся рекомендованные значения, в проекте Квики, не случайно.
Потихоньку руки доходят до двигателя, решили проверить его состояние, так реально оно было не известно, а "уважаемые" люди, к коим обращались за советом, сразу предлагали его разобрать и посмотреть что внутри. Компрессометр мне в руку, получилось вот такая вот фигня
За звуковую дорожку сорри, да и бред я нес, но главное что компрессия у двигателя оказалась на нужном уровне, то есть одинаковая в обеих секциях, и больше 6.
[media]http://youtu.be/mSFERq7be1Q[/media]
[media]http://youtu.be/EnqR9TZK_sU[/media]
За звуковую дорожку сорри, да и бред я нес, но главное что компрессия у двигателя оказалась на нужном уровне, то есть одинаковая в обеих секциях, и больше 6.
[media]http://youtu.be/mSFERq7be1Q[/media]
[media]http://youtu.be/EnqR9TZK_sU[/media]
Двигатель был не сухой, те с маслом. Единственное что в первой секции масла было поболе, чем во второй. Двигатель нам достался "как есть", хотя и был завернут, входы и выходы с заглушками, стальные детали в "сале", ну типа законсервирован для хранения. В поддоне плещется масло. Цель эксперимента состояла именно в определении необходимости переборки мотора, перед началом работ по подготовке к запуску. До усера крутить не собирались, да и давление до максимума набирается примерно за 1 полный оборот эксцентрикового вала, что собственно тоже показатель состояния всех уплотнений роторов. Сейчас колдую над временной схемой зажигания и вояю входной коллектор под карб. Задача 2 заставить его урчать 🙂 потом будем уже нормальную систему впрыска и выпуска городить.




Vladimir1950
Я люблю строить самолеты!
Обожаю сидеть практически внутри бензобака. Вдохновляет на высшую степень осторожности.
Это всегда круто, сидеть внутри топлива. Вообще для дальних перелетов, кабину заправлять под завязку и самому сидеть в бензостойком гидрокостюме. Конечно же еще другие варианты, например закрепить канистру над головой, или скажем за спиной. Если в крыло залить, то тоже интересно. При ударе обычно крыло первое сминается, больше разольется. В перспективе можно поменять бензиновый двигатель на электрический и посадить на пачку нестабильных литиевых элементов, так что б, то ли электрический стул получился, то ли турбо гриль. Вариантов много. Особенно в маленьком самолета. А на счет осторожности, она никогда не по помещает. 😉
Уважаемый Соседко. Вы предлагаете на продажу микросферы. Две недели назад я отослал Вам запрос в "личку", затем по эл. почте. Ответа так и не дождался...
Две недели назат на почту ответил. Сегодня ответил в личку. Если что, на сайте есть мой телефон, скиньте СМС, я перезвоню. Удачи!
Leon CX
Будь просто - смог бы каждый...
Cоседко, я в 2006м заболел Авиацией, в 2007мом вашу ветку смотрел несколько раз в неделю....в 2014 вот что получилось у меня:
http://www.rotaryforum.com/forum/album.php?albumid=271
http://www.rotaryforum.com/forum/album.php?albumid=270
успели построить 9ть аппаратов из которых 3и уже летает
я к тому что:
1) не ковыряйтесь в носу, а идите вперед
2) у Вас все получится, а если что-то таки не получается - смотрите пункт №1
http://www.rotaryforum.com/forum/album.php?albumid=271
http://www.rotaryforum.com/forum/album.php?albumid=270
успели построить 9ть аппаратов из которых 3и уже летает
я к тому что:
1) не ковыряйтесь в носу, а идите вперед
2) у Вас все получится, а если что-то таки не получается - смотрите пункт №1
- Откуда
- Цфо
Жалко что у ребят пропал запал!!
Запал у нас не пропал, мы живее всех живых, более подробные новости пишем здесь в группе - http://vk.com/asa_sec
Если коротко то: ждем раскроенных баков на самолет, далее сварка и начнем тянуть топливную систему.
А если глобально, то в настоящий момент имеем 2 дня в неделю (выходные) когда можем приложить руки к самолету. Ввиду переезда на новое место были долго озабоченны, наведением порядка и созданием минимульных условий работы.
Если коротко то: ждем раскроенных баков на самолет, далее сварка и начнем тянуть топливную систему.
А если глобально, то в настоящий момент имеем 2 дня в неделю (выходные) когда можем приложить руки к самолету. Ввиду переезда на новое место были долго озабоченны, наведением порядка и созданием минимульных условий работы.
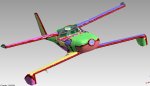
Пункт 9 должен быть в нижней точке системы, ибо наличие воды в топливе в вашем случае не проконтролируешь. Мне кажется лучше перенести его назад до упора.закончали деталировку и уточнениние геометрии топливных баков
Пунк 9, находиться как раз в нижней точке, с учетом стояночного угла самолета. Нижее нету. Вообще пока прорабатывали баки, и смотрели как сделано у "них", пришла идея, кран слива вынести за бак. Тоесть разместить его за спинками сидений. Тогда после стоянки, достаточно будет слить стакан бензина и весь отстой, какой будет, стечет из магистрали. Да и в баке потребуется минимум дорабток, тольк трубку вынести. Баки раскроены, пытаемся помаленьку собирать

Кстати второй самолет на продаже в виде кита: http://www.reaa.ru/cgi-bin/yabbA/YaBB.pl?num=1422882114/0#0
Кстати второй самолет на продаже в виде кита: http://www.reaa.ru/cgi-bin/yabbA/YaBB.pl?num=1422882114/0#0
Similar threads
- Ответы
- 35
- Просмотры
- 3413
- Ответы
- 29
- Просмотры
- 10743
- Ответы
- 133
- Просмотры
- 12024
Поделиться: