Цитата:
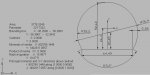
Нарисовался приблизительный эскиз-компоновка (вид сбоку) "РЛД с шариками".
Наверное очень приблизительный.
Спасибо, Вам тезка, простимулировали немножко упорядочить эскиз. Я ввел еще три различных цвета: для различения блоков полуоси и лопасти, - деление на "красных и синих".
Синхронизирующий вал равномерной скорости, которому соосны полуоси, - остался черного цвета. Он взаимодействует посредством промежуточных шариков с обеими полуосями.
Канавки под шарики на внешней цилиндрической поверхности вала и канавки с внутренней цилиндрической поверхности коаксиальных полуосей выполнены разными, как по кривизне, так и по поперечному профилю-сечению канавки.
Вал имеет две системы канавок, сдвинутые вдоль оси, а каждая полуось, - только одну систему канавок.
Система - громко сказано.
Это просто некоторое количество параллельных и идентичных канавок в каждом случае. Их назначение - увеличить суммарную площадь силового контакта шариков и канавок.
В данном эскизе показана возможность симметричного размещения 4-х шариков, "обслуживающих" одну полуось лопастей.
Для различения шариков, функционально привязанных к полуоси определенного цвета, шарикам придан тот же самый цвет, что и у "обслуживаемой" полуоси.
Но цвет канавок-дорожек под шарики левой и правой полуоси принят разным, так как они имеют определенные фазовые различия.
Различия затрагивают как особенности изменения кривизны канавок, так и особенности сечения-профиля канавки на разных ее участках.
Ну и желтого цвета - неподвижный "сепаратор" шариков. Он имеет прорезь, ориентированную вдоль образующих цилиндрических поверхностей.
Резюм: шарики НЕ вращаются на орбите, - они движутся только по линии. То слева направо, то справа налево. Инерция у них не большая, но лишний вес тут и не нужен.
Шарики, некогда от природы имевшие много свобод движения, ограничены только линейным перемещением и всякого рода вращениями вокруг собственного ЦТ.
Зажатые между канавками-дорожками коаксиальных цилиндров, они задают единственное в каждый момент времени решение (системы) о перемещении связанных с ними кинематических звеньев. Свобод у них стало очень мало!