Стало быть, механизм возвратно-поступательный, двойного действия
Андрей, это Вы?
Мне нравится, что Вами отмечено "двойное" действие лопастей.
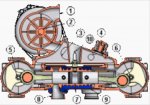
Учтем, что РЛД почти не отличается от ... мотора схемы Юнкерса (см.рис) со встречно движущимися поршнями, - по критерию "поршни/лопасти идут навстречу друг другу", чтобы
совместно преодолеть то же самое расстояние, которое в одно-поршневом цилиндре приходится преодолевать ЕДИНСТВЕННОМУ поршню...
Если вдуматься, то увидим, что по упомянутой причине
инерционные силы поршня/лопасти в схемах Юнкерса и в РЛД, -
вдвое меньше, чем, например, в любимых некоторыми мото-байках, при прочих равных условиях
🙂
В "коротких ходах" обоих схем, - Юнкерса и РЛД,
средняя скорость поршня/лопасти НИЖЕ, чем у одно-поршневого длинноходового ДВС.
Однопоршневой проходит бОльшее расстояние при одних и тех же оборотах, и ускорения (инерционные силы) на этом поршне
приходится допускать значительнее.
Пусть шатун одно-поршневика не нагружен на изгиб, но он тем не менее загружен "по горло" сжатием/растяжением. И гоночные моторы показывают жизнь, типа "халиф на час".
Этого НЕ требуется РЛД в той же степени - рычаги могут и на изгиб поработать...
НЕ СТОИТ ТАК СИЛьно "поклоняться поршневикам"!
Ибо даже в авторитетном решении Юнкерса -
боковое трение поршней, прижимаемых "со страшной силой" к цилиндру, -
НЕ УСТРАНЕНО.
Впрочем, и у двух-коленвального аналога РЛД, - решения Юнкерса, - кажется, больше шестерен и др. проблем, чем у РЛД с "шестеренно-коленвальным синхронизатором", имхо
🙂