Все-таки в отличие от Волги и Акваглайда он летит.Зорги такой экраноползик прошлой зимой и "замастрячили"
Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Примечание: This feature may not be available in some browsers.
Вы используете устаревший браузер. Этот и другие сайты могут отображаться в нем неправильно.
Необходимо обновить браузер или попробовать использовать другой.
Необходимо обновить браузер или попробовать использовать другой.
Экраноплан.
Alex_520
Сменил аватарку - ушёл в малую авиацию
- Откуда
- Западный Урал, Пермский край
Валентина неоднократно упоминала что это её изобретение, но мой знакомый патентовед нашол патенты совсем не от её лица на эту же тему. В патентах ескизы один в один как на эскизах Валентины. А засветил я это только потому что сам видел копии патентов, но не от лица Валентины. Это уже давно не секретное изобретение, но почему то, как у нас часто бывает, не разу не воплощённое в метале. И Самое забавное что проекту и патентам более 20 лет.
И о Валентине, ну не могу я понять отчего же она это всё называла своим изобретением, а патенты на другое лицо.
Информации о летающих аппаратах я пока не имею.
Проект EWA разрабатывался в самые последние годы существования алексеевского ещё ЦКБ по СПК группой его работников. Как их собственная инициативная разработка, "на кухне", по лучшим традициям советских времён.
Авторы боялись, что в случае успеха этого проекта он может оказаться под грифом у военного заказчика. Имели такой опыт уже. Потому и "хоронились" на кухнях посёлка Кузнецово...
Автором-компоновщиком проекта был инженер-конструктор ЦКБ по СПК Александр Единорогов, который ныне живёт и работает в Заволжье, на моторном заводе.
А Валентина Михайловна - его соавтор, промышленный дизайнер, работавшая в ЦКБ по СПК и над другими проектами тоже. Например - над СВП "Гепард"....
Патентную документацию они так и не оформляли (по ряду причин) - потому и была у меня эта информация "без права публикации", под моё честное слово.
В 91-92 году в Нижний приезжала группа американцев (в числе которых был не только сам Берт Рутан, но и генерал Чарльз Диксон, так вроде бы правильно его звали).
Наши начальнички тогда "с радостью" подарили американцам большинство идей и разработок ЦКБ по СПК, устроив им пышный приём в Сормово, в Кузнецово и в Каспийске. Показали всё, практически без утайки. "Забыв", что пару лет назад всё это было под грифом "Строго секретно".
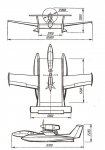
Диксон в одной из приватных встреч с сотрудниками ЦКБ по СПК узнал о существовании "партизанского" проекта коммерческого амфибийного экранополза с ШВП (рисунок которого показан выше). И как истинные американец с коммерческой жилкой очень этим проектом заинтересовался.
Взял кое-какие наброски Валентины Михайловны (один из них вы и показали первоначально) и увёз их в Штаты. Там и проскочила информация об этом проекте на форумах в Интернете, я так думаю.
Генерал этот собирался создавать СП по реализации этого проекта как инвестор, способный привлечь к разработке нужные инвестиции со стороны ряда американских фирм. Но не успел - скоропостижно скончался. На том это проект и завершился, так и не начавшись.
Летающих аппаратов по этой схеме не было (насколько я в курсе). Да и быть не могло, так как в нём есть некоторые серьёзные проблемы самой концепции (на мой взгляд). Моделей тоже вроде бы не было...
Валентина Михаловна перебралась в Тольятти и пыталась протолкнуть идею этого проекта там, печаталась в месной газете несколько раз и встречалась с местными денежными боссами из СОК. Но - не срослось...
Пару лет назад она вернулась в Кузнецово (где у неё квартира осталась), но на нагапетяновскую фирму не смогла устроиться, у них там с работой напряжёнка и тогда была, даже до кризиса.
Кормилась она дизайн-проектами и оформительской деятельностью. Я её познакомил с "дедом Морозом", который пригласил е оформлять его книгу-учебник для студентов Нижегородского политехнического института (по АВП и экранолётам).
Чем занимается она сейчас и где находится, сказать не могу - связь утерял. А в Кузнецово добраться из Перми как-то пока не получается, хотя и недавно совсем был в Нижнем.
Вот такова история этого так и нереализованного дизайн-проекта амфибийного экранополза EWA с шасси на воздушной подушке на 15 посадочных мест...
- Откуда
- Саратовская обл.
\\\\
Все-таки в отличие от Волги и Акваглайда он летит.
[highlight] Обратите внимание на крыло[/highlight] !!! :~)
Alex_520
Сменил аватарку - ушёл в малую авиацию
- Откуда
- Западный Урал, Пермский край
Все-таки в отличие от Волги и Акваглайда он летит.
Точно так же как и АКВАГЛАЙД и ВОЛГА-2
Разница только в крыле по схеме Йорга
Владимир!
А поподробнее про аппарат за №34на фото выше что-то можешь рассказать?
А вы знаете, почему тандемы над экраном устойчиво летать не могут?
Нет, не знаем...
Расскажите нам пожалуйста свою версию!
Внимательно слушаем
В свое время я был весьма увлечен ЭП по схеме тандем (обращаю внимание - без поддува).
В самом деле, что проще? Разнесли крылья по длине и все вопросы решены. Приподнялась одна из поверхностей над экраном, тут же потеряла подъемную силу и вернулась обратно.
Потом, когда мы сделали расчетную программу моделирования полета ЛА над экраном, я естественно прогнал на ней и тандем. Вопрос был простой, на какое расстояние необходимо разнести поверхности для обеспечения продольной устойчивости, а также выявить границы области устойчивого полета по скорости и высоте.
А потом началось прозрение.
Не летит тандем устойчиво и все. То есть летит некоторое время (кстати, одна секунда полета считалась тогда аж на пентиумах и цириксах пару часов, а сама задача - и несколько суток ), а потом раскачивается и если не цепанул экран (тогда решение разваливается) уходит в устойчивый свободный полет.
Начал разбираться в причинах и вот, что оказалось.
Экран влияет не только на сопротивление и подъемную силу ЛА, но и на скос потока за крылом. На ЭП, как правило, применяется крыло малого удлинения, а именно такое крыло генерирует большие скосы без экрана. А на сверхмалых высотах скосы - ноль. Получается, что заднее крыло (ЗК) работает в условиях изменяющихся местных углов атаки при изменении скосов от переднего крыла (ПК).
Теперь о том, что происходило с аппаратом.
1. Возмущение (мизерное - на копейку), например по скорости в плюс.
2. на ПК и чуть позже на ЗК увеличилась ПС.
3. высота над экраном увеличилась (на милиметры), при этом скос потока от ПК увеличился и это изменение пошло назад по потоку, приближаясь к ЗК
4. а. ПС на ПК падает от ухода от экрана и растет от возникшего (на секунды) угла атаки.
б. а вот на ЗК ПС тоже падает от ухода над экраном и еще раз падает от уменьшения местного угла атаки из-за возросших скосов
5. Из-за разницы в ПС на ПК и ЗК появился кабрирующий момент и угловая скорость в продольном движении
6. Учитывая ненулевой момент инерции ЭП проскакивает начальное статически устойчивое положение так, что ЗК приблизилось к экрану, а ПК удалилось
7. За счет падения ПС на ПК и повышения ее на ЗК возникает пикирующий момент с последующим уменьшение ПС и высоты над экраном.
Далее возможно развитие событий по п.п. 2-7 с точностью "до наоборот",
либо по упрощенному варианту по п.п. 5-7, только с некоторым увеличением амплитуд колебаний параметров. Происходит раскачка со всеми вытекающими... :'(
Что касается схемы тандем с поддувом (например, пост #2945), то эта схема вполне жизнеспособна, но с двумя оговорками.
1. использование поддува влияет на экономику силовой установки и... не в лучшую сторону.
2. серьезное ограничение по высоте полета: попытка подняться чуть выше приводит к повышению потребной мощности и снижению продольной устойчивости над экраном





Alex_520
Сменил аватарку - ушёл в малую авиацию
- Откуда
- Западный Урал, Пермский край
Ну и где же этот "француз" из Ниццы и "Касатка" из Обнинска сегодня? Что-то до сих пор тишина с ними...
Чего-то Вы не поняли в виртуальном мире (когда чего-то там моделировали на ПК, это - не крыло, а PC).
Господин Шувалов перепутал вихреобразование со скосом потока.крыло малого удлинения, а именно такое крыло генерирует большие скосы без экрана
Кроме того, есть изобретения по поводу использования положительного эффекта - отражения от экрана следа за ПГО (ПК).Существует еще такая самая малоисследованная штука (которую, как я считаю, лучше избегать вообще, не взирая даже на то, что порой можно получить положительные эффекты) - аэродинамическая ИНТЕРФЕРЕНЦИЯ.Вот и разнесите.В самом деле, что проще? Разнесли крылья по длине
Господин Шувалов перепутал вихреобразование со скосом потока.
1. Думаю, до господина не дорос.
2. Я специально применил к термину "скос" слово генерировать, потому как вихреобразование и скос - суть одно явление.
Кроме того, есть изобретения по поводу использования положительного эффекта - отражения от экрана следа за ПГО (ПК)
ПГО дает слабые скосы.
Если речь идет о крыле, то были картинки, где консоли стабилизатора разнесены шире размаха крыла. Но там с прочностью могут быть проблемы (кручение балок крепления консолей стабилизатора)
...метров на семь...восемь для одноместного аппарата, да еще без ясного понимания о динамической устойчивости.Вот и разнесите.
А, самое главное, зачем, если есть понимание облика динамически устойчивого ЭП.
Вложения
Интернет богат картинками.А, самое главное, зачем, если есть понимание облика динамически устойчивого ЭП
А у этого монстра с прочностью-то не решено.
У орленка хвост отвалился. А у этого ВО на консоли стабилизатора припаяли. Сами догадались, или кто надоумил?
Разные они.вихреобразование и скос - суть одно явление
Скос от присоединенного вихря - одно и вихреобразование от перетекания снизу наверх на консолях - второе.
Именно второе больше на крыльях малых удлинений.
Разные они.
Скос от присоединенного вихря - одно и вихреобразование от перетекания снизу наверх на консолях - второе.
Именно второе больше на крыльях малых удлинений.
Или сделайте ссылку на источник данного утверждения или докажите...
lav
Я люблю строить самолеты!
Если речь идет о крыле, то были картинки, где консоли стабилизатора разнесены шире размаха крыла. Но там с прочностью могут быть проблемы (кручение балок крепления консолей стабилизатора)
Не трудно заметить ,что в моей "Экзотике" все эти моменты учтены:
1 Коробка решетчатого крыла (в роли стабилизатора) расположена в зоне отрицательного градиента скоса потока от крыла молого удлинения ....чем больше ПК отходит от экрана тем больше скос потока вверх(в этой зоне)... тем больше угол атаки на РК(восстанавливающий момент пропорционален величине ухода ПК от экрана)
2 Именно для минимизации крутильной деформации размах РК равен 0,62 м (при силовой схеме "ферма" 0,4 м строительной высоты)а при выкладке в матрице балок стабилизатора применена сверхвысокомодульная углелента . (вес планера самолёта 52 кг)
3 Малые хорды РК (0,27м) не подвержены влиянию экрана.
И это не "картинка"- см №2471
_________033_001.jpg (179 KB | 6 )
____________0007_001.jpg (35 KB | 4 )
Не трудно заметить ,что в моей "Экзотике"
А как сейчас дела с Проектом обстоят? Процесс идет? Какие планы?
http://www.youtube.com/watch?v=J7XfD8Ir4GYPFELIX писал(а) 12.01.11 :: 15:17:08:
На пробу
Есть что-то ещё?
http://www.youtube.com/watch?v=J7XfD8Ir4GY
Обратите внимание на колебательный процесс 5...15 сек. А также на практически штилевые условия...
S_Vladimir
Я люблю создавать экранолёты!
🙂
А также как собственно защитите окружающих от неё?
"Мясорубку" спереди от забрызгивания как защищать будете?http://www.youtube.com/watch?v=J7XfD8Ir4GY
А также как собственно защитите окружающих от неё?
lav
Я люблю строить самолеты!
Не трудно заметить ,что в моей "Экзотике"
А как сейчас дела с Проектом обстоят? Процесс идет? Какие планы?
С тех пор прошло 12 лет , но аппарат цел (фонарь только разбит) матрицы целы...12лет собираюсь доработать его до экранолёта...,ситуация как в анекдоте :.."есть где , есть кого ...нечем" ;D Есть помещение ,есть материалы , есть станки ....нет времени и сил (74 года однако!) Если найду молодых помошников постараюсь в этом году спустить на воду. По крайней мере , есть полная ясность как делать. 😉
Поделиться: