FlyCat
43 регион
- Откуда
- Не член РАОПА
Follow along with the video below to see how to install our site as a web app on your home screen.
Примечание: This feature may not be available in some browsers.
а как Вы так ловко обрезали?alex_toronto, обрезание картиночкам сделать религия не позволяет?
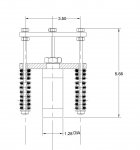
Вообще-то только 2 болта - они потом убираются, служат только для отжатия поршня при заполнении маслом.Зачем три болта?
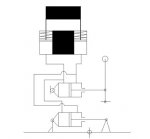
Дело в том, что по Вашей схеме используются только половины цилиндров - не очень рационально, но работать будет.Это то что заменяет гидроаккомуляторы
Я еще переделаю - добавлю пружины по бокам
У меня есть в наличие такие - .75 на 5 дюймов - 2 шт,но много зависит от диаметров самих гидроцилиндров
Пожалуйста объясните что это такое.жёстко между собой поршни демпферов,иначе у вас будет гидравлический люфт.
Пружина на демпферы подбирается таким образом, чтобы влюбое постороннее усилие на рулевой поверхности заставит перемещаться поршни демпферов
Не приходила - а это,между прочим,фактически и есть единственная причина нераспросраненности системы гидропалок:все системы,где требуется передать усилие,а не перемещение,используют такой гидропривод более чем успешно.
Поэтому,не решив этот вопрос на принципиальном уровне,даже браться за гидропривод бесполезно.
Все понял - так как у меня работать не будет.Попробуйте простой эксперимент,возьмите две жёсткие пружины,между ними проложите пластину,сожмите пружины (рукой,тиски,пресс) и попробуйте подвигать пластину по оси сжатия,результат вас удивит.
Получается площадь поршня 2,8смкв. Усилие на ручке в канале тангажа с небольшим запасом 30кг, ход 20см, рычаг выходит 1/3, т.е усилие на штоке 90кг. Давление 32 кгс на см кв. Они лопнут. Или только в канал крена без запасов. Нужны с большим диаметромУ меня есть в наличие такие
Весьма интересно, ждём конкретики. Но есть нюанс, при максимальном отклонении, получается усилия на ручке будут нулевыми? Или наоборот?продолжу позже
Хотя бы можно быстро собрать из того что есть, при этом неПолучается площадь поршня 2,8смкв. Усилие на ручке в канале тангажа с небольшим запасом 30кг, ход 20см, рычаг выходит 1/3, т.е усилие на штоке 90кг. Давление 32 кгс на см кв. Они лопнут. Или только в канал крена без запасов. Нужны с большим диаметром
Для эксперимента можно!из того что есть