Спорное утверждение, ибо клапана максимального давления в нормальных условиях не должны открываться и следовательно ни о каком выравнивании речи быть не может.
А что значит "в нормальных условиях"? Вообще-то как бы мы тут обсуждаем проблему рассинхронизации и возврата к нулю/к синхронизации. Так вот фича схемы как раз в том, что объём каждой из двух ветвей может сохраняться неизменным при движении ручки и руля
только в том случае, если руль и ручка точно синхронизированы. В противном же случае - если произошла рассинхронизация - при любом движении объём обеих ветвей одновременно чисто кинематически не может сохраниться постоянным (и сумма этих объёмов - тоже, скорее всего, изменяется при любом движении, хотя как она изменяется и какая из ветвей сосёт/выдавливает, уже зависит от условий, читай, от действующих сил со стороны ручки и со стороны руля), т.е. неизбежно либо какая-то ветвь засасывает недостающую жидкость, либо избыточная жидкость из какой-то ветви выдавливается. Т.е. как минимум можно сказать, что любой сколько-нибудь объёмный поток засасывания или выдавливания через обратные клапаны или клапаны макс. давления, приуроченный к движению ручкой, как раз служит признаком ситуации рассинхронизации привода. Другой вопрос - что с этим делать, т.е. как вернуться к синхронизации.
Слишком сложная для понимания схема,
Насколько схема сложна или проста для понимания, не играет совершенно никакой роли. Важно только то, работоспособна она или нет, при каких условиях она делает то, что мы от неё хотим, и не делает ли она чего-то неприемлемого. Даже если схема не поддаётся пониманию (да, для меня она тоже сложновата для понимания, так что я не могу сделать никаких определённых утверждений о её работоспособности, а только предположения), она может быть численно смоделирована, и на этой модели вполне можно проверить, работает она или нет, исходя из различных начальных положений и условий.
Например, вот сейчас у меня возникло нехорошее подозрение, что схема номер 1 умеет приводить руль только в сторону нуля, но не от него. А если так, то она способна синхронизировать привод только тогда, когда ручка находится ближе к нулю, чем руль. При рассинхронизации же в обратную сторону как бы не получилось так, что схема наоборот по мере нескольких качаний загонит ручку в край, приводя руль близко к нулю. Это опять умозрительное предположение, по-хорошему, надо просто численно смоделировать. Ну или аккуратно вручную аналитически рассмотреть происходящее в таком положении.
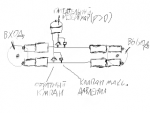
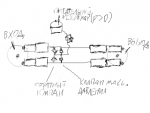
особенно в части некоторой промежуточной ёмкости (на рисунке плохо видно)
Что там плохо видно? Промежуточную ёмкость? Так это просто участки каналов между тремя парами клапанов - т.е. то, что находится на рисунке посередине между ветвями. Причём там объём чем меньше, тем лучше, никакого ни воздуха, ни гидроаккумуляторов там нет, и соотв. она и не нарисована как какая-то "ёмкость". Просто надо же было как-то в тексте обозначить этот объём и такой параметр как давление в нём...
И тут пилот наблюдая на манометрах и указателях положения РУС и рулей всю ненормальность ситуации перед полётом, берёт и выставляет рули в ноль!
Не думаю что уход от ноля быстротечный момент.
Перед полётом вообще-то можно и руками выставить синхронизацию. При наличии указателя положения руля (ну как там, скажем, сельсином или чем-то вроде того) можно и в полёте вручную выставлять. Поставить насос, который будет не слишком быстро, но уверенно накачивать жидкость в ту ветвь, где оказалось маловато, или, наоборот, откачивать оттуда, где многовато. Или перекачивать из одной ветви в другую, с попутным автоматическим подсосом/выдавливанием в одной из ветвей, где давление в процессе перекачки выйдет за границы дозволенного. Перекачку оную можно осуществить и автоматически - ну там пара сельсинов, контакты, определяющие, куда качать, или вообще не качать, и готово. Только это ж неспортивно, и для этого вообще не нужно размещение ветвей на 90 градусов (или сколько-то ещё, только что не 180): имея указатели положения рулей, можно принудительно восстанавливать синхронизацию для любой из схем, нарисованных выше в теме, будь то хоть с двумя ветвями под 180 фазовых градусов, хоть вообще с одной ветвью. НЯП, речь всё-таки шла о том, чтобы восстановление синхронизации происходило в рамках исключительно самого гидропривода, и без задействования для этого каких-то датчиков положения.
Мне первая схема больше нравится, только надо два регулирующих питательных резервуара и все проблемы с сильной рассинхронизацией решаются ручками в пять сек
Не вижу необходимости в двух резервуарах. Так, как сказано выше, т.е. вручную перекачкой между ветвями, глядя на указатели положения, всё спокойно делается и с одним резервуаром.