Андрей, сначала об этих пружинках.
kyava сказал(а):
slavka33bis сказал(а):
А от сюда следует, что при максимальном угле установки лопасти эти пружины максимально РАССЛАБЛЕНЫ.
Ты забыл про треугольник усилий ( а может намеренно опустил?). Что такое неустойчивое равновесие наверное все помнят из школьного курса физики. Да еше умноженное на усилие пружины...
Дальше надо объяснять ?
😎
Нет, я о нём (о треугольнике усилий) помню.
И знаю о неустойчивом равновесии.
Хорошо, что ты об этом сам упомянул.
Тебе +1.
Просто, ты Андрей вот тут:
kyava сказал(а):
Причем максимальный соответствует максимальной натяжке пружины.
, видимо, не совсем точно выразился.
И из-за этого я тебя не правильно понял.
По этому я тебя и поправил.
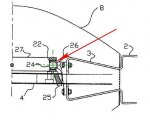
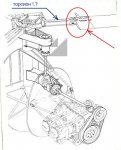
Ты ведь, видишь и понимаешь, если рассматривать только сами пружины, то видно, что в "верхнем" положении поводка лопасти расстояние между опорными шариками пружины больше, чем при "нижнем" положении повдока.
По этому я и уточнил, что в "верхнем" положении пружина слегка расслабляется.
А теперь вернёмся к треугольнику усилий.
Мы с тобой Андрей прекрасно видим на картинке (с максимальным углом установки лопасти) и понимаем, что это положение уже является устойчивым.
И в этом положении от действия пружины появилась сила, направленная по часовой стрелке (вверх).
И относительно центра "Шарового Шарнира" эта сила создаёт момент.
Я щас объясню для чего я про это так подробно «говорю».
Вывод будет в конце поста.
Так вот, когда пружина находится в положении равновесия (пусть даже и не устойчивого)
Силы нет и, значит, момент от этой силы равен «нулю».
Правильно?
А когда эта пружина встаёт в устойчивое положение?
Правильно.
Когда угол установки лопасти примерно равен нулю (а может быть, равен точно «нулю»).
А в таком положении лопасти её силовой элемент (ОООчень гибкий торсион) находится в состоянии абсолютной НЕСКРУЧЕННОСТИ относительно продольной оси лопасти.
Правильно?
А в этом положении от гибкого торсиона на поводок лопасти и дальше на всю проводку системы управления не передаётся ни каких статических усилий.
Теперь, как только пилот начинает увеличивать угол установки лопасти, пружина выходит из равновесия и начинает создавать силу.
И чем больше угол установки, тем большую силу (в этом ты прав) создаёт пружина.
А раз больше сила, то и момент от этой силы тоже растёт.
Теперь мы спросим.
А для чего этот, растущий с увеличением угла установки лопасти, момент?
Так ведь, при увеличении угла установки лопасти её торсион
(который, в силу некоторых геометрических причин, получился до безобразия гибким)
тоже начинает закручиваться.
А при своём закручивании он начинает создавать силу реакции (силу сопротивления закручиванию).
И чем больше угол закручивания торсиона, тем больше сила его реакции.
И по каким-то, известным только разработчикам этого аппарата, причинам они приняли решение СНЯТЬ нагрузки
с проводки системы управления общим шагом ротора.
Хотя бы, основную их часть, пусть даже эти нагрузки значительно ниже,
чем они были бы в случае применения относительно ОООчень жёсткого торсиона,
как в случае с «Ротрфлаем» и «Бориской-001»».
Они, ятакпонимаю, хотели сделать так, чтобы усилия на проводке управления «Общим Шагом» были абсолютно одинаковыми при любом значении угла «Общего Шага».
А если выразиться ещё точнее, то можно сказать так:-
"От действия этих пружин нагрузки на проводку управления ОШ лопастей СНИМАЮТСЯ, практически, ПОЛНОСТЬЮ."
Как это понять?
Очень просто.
Если, допустим, отсоединить тяги от поводков лопасти, и руками эту лопасть повернуть на любой угол их установки (в интервале от минимального до максимального) а затем убрать руки,
то лопасть не повернётся обратно, а останется в том положении, в котором её оставили руки человека.
Если бы этих пружин небыло, то
во-первы, поворачивать лопасть было бы труднее.
Руки бы почувствовали силу реакции торсиона лопасти.
а
во-вторых, после того, как человек убрал бы свои руки от лопасти она бы под действием силы реакции торсиона вернулась бы в своё первоначальное положение.
P.S. Нагрузки в проводке управления ОШ от аэродинамических сил – это другая песня.
И рассматривать мы их пока не будем.
И теперь основное.
ВЫВОД:
Эти пружинки -- это не иначе, как «КОМПЕНСАТОРЫ силы реакции торсиона при его закручивании
относительно продольной оси лопасти».
второй P.S. Андрей, это сообщение -- это не тот "Ход Конём" ("Контрольный Выстрел"), о котором я "говорил" чуть выше.
Он ("Контрольный Выстрел") будет чуть позже.
Перед "Контрольным" будет "Предупредительный в воздух".
И касаться это будет "Аэродинамики".