Все-таки бесхвостки - тупик.
Я тут на досуге пытаюсь в тупой простой бесплатной программе XFLR5 заставить хорошо задокументированный як55 летать , как по РЛЭ - чтоб кривые ЖУковского рассчетные совпадали с тем что в книжках написано как и скорости сваливания и т.д. После того ,как добился некоторого реализму, считал разную хрень- необходимые отклонения руля высоты для горизонтального полета на разных скоростях ,балансировочные потери и т.п.
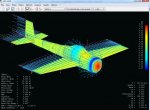
Тут решил побыстрому рассчитать бесхвостку на базе ЯК55.
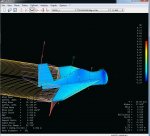
Крыло увеличилось до 18м2 , корневой профиль использовал тоньше, сдвинул крыло вперед и укоротил хвост, увеличив вертикальный стабилизатор. Вот такой уродец получился- модель отбалансировалась и в виртуальном мире летает. Стал ее на разных скоростях балансировать- а чем ею по тангажу управлять - видимо, зависающими элеронами. Сделал зависающие элероны во всю заднюю кромку и тут все понял ...
Стоит, например ,у самолета обычной схемы сделать проход над полосой на максимальной скорости и уйти на вертикаль. Дает он ручку на себя слегка -хвост проваливается, угол атаки основного крыла увеличивается , подъемная сила растет и самолетик сразу резко лезет вверх.
Делает летающее крыло проход над полосой- пилот дает ручку на себя - флапероны откланяются вверх, подъемная сила падает, и ,если, у крыла нет запасу высоты оно впиливается в планету. Лень картинки в динамике давать -но оно так. Перед тем , как начать увеличивать угол атаки, самолет-крыло будет просаживаться перед набором и вспухать перед снижением.
Вы действительно хотите такой самолет?
P.S. Делтапланы потому и летают, что там никакой механизации нет.